燕山大学专家提出无刷直流电机转子磁场定向瞬时转矩控制的新技术
无刷直流电机(Brushless DC Motor, BLDCM)因其结构简单、功率密度高、寿命长等优点,被广泛地应用于新能源汽车、医疗器械、航空航天等领域。方波电流驱动方式凭借着实现简单、经济可靠等优点,在无刷直流电机控制系统中得到广泛应用,但是由于非理想反电动势的作用以及绕组电感的存在,使无刷直流电机在运行过程中普遍存在较大转矩脉动,其中换相转矩脉动最为严重,最大可达约50%的平均转矩,严重制约了其在高精度场合的推广和应用。
国内外相关学者针对如何有效抑制无刷直流电机的转矩脉动进行了大量研究,主要从优化电机本体设计和优化控制策略两方面出发来抑制无刷直流电机的转矩脉动。其中基于优化控制策略的措施主要包括换相期间与非换相期间采用不同的调制策略、在逆变器前端添加辅助电路等,其主要思想是平衡换相期间开通/关断相电流的变化速率,维持非换相相电流稳定。此外将直接转矩控制方法应用到无刷直流电机的控制系统中,也能够取得良好的转矩脉动抑制效果。
无刷直流电机控制系统的主电路一般采用三相电压型逆变器,除方波电流驱动方式外,在不改变逆变器拓扑结构的前提下,也可以采用三相导通方式驱动电机运行。具体选用何种驱动方式主要由无刷直流电机需要的性能决定。越来越多的研究发现,三相导通方式不仅不存在换相问题,而且在改善电机运行性能方面同样具备优势。为了避免复杂的复指数分解,一些学者提出从矢量的角度对无刷直流电机的运行过程进行分析。
考虑到传统的3s/2r坐标变换无法得到无刷直流电机的转子磁场定向等效模型,燕山大学电力电子节能与传动控制河北省重点实验室的李珍国、王鹏磊、孙启航、贾益丞,在2022年第22期《电工技术学报》上撰文,提出一种基于逐相旋转坐标变换的转子磁场定向方法,即对每相转子磁链逐一进行旋转坐标变换得到各相绕组的转子磁场定向等效模型,再以功率守恒为原则进行三相合成,得到无刷直流电机转子磁场定向等效模型。
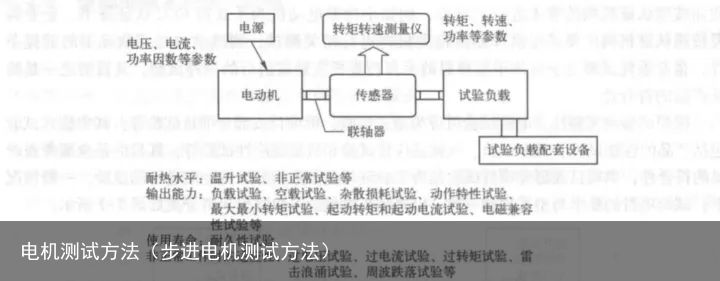
图1 整体系统框图
图2 无刷直流电机控制实验系统
据介绍,这种基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术,针对非正弦的三相转子磁链,通过对每相绕组单独进行旋转坐标变换,再以功率守恒为原则进行三相合成,可获得无刷直流电机转子磁场定向dq旋转坐标系下的等效模型;转子磁场定向dq旋转坐标系下,能够做到d、q两轴之间的转矩解耦。其中,q轴电流用于实现恒定瞬时转矩控制;d轴电流可用于实现其他控制目标,如无增磁/去磁的电枢反应等。
研究人员指出,该控制技术不存在换相过程和状态切换,不需要添加额外的硬件电路,具有较强的实用性和灵活性。
本文编自2022年第22期《电工技术学报》,论文标题为“基于逐相旋转坐标变换的无刷直流电机转子磁场定向瞬时转矩控制技术”。本课题得到国家自然科学基金资助项目的支持。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫