电机参数辨识与自整定技术总结
参数辨识我是觉得没必要当做一门主要钻研的技术,我甚至觉得对于普通人来说电机控制都没必要当做一门主要钻研的技术,会用就好。
因为这些都是底层技术,是被别人用的。众所周知,对于普通人来说(注意这个状语),越底层,越基础的行业越难赚钱,如果你是天才,当我没说,如果反对我,那么你是对的。
为什么生化环材那么不受待见,工资那么低,根本原因是因为这些行业都是底层技术。但是又有个悖论,国家之间的竞争,大部分又都是靠底层技术来竞争的(例如你的材料纯度高、强度高、产量大等等)。
所以我得出一个结论:如果你是天才,就去底层行业,如果是普通人,就搞计算机去,越上层越好,然后再从上到下,在做项目的时候,不要给定边界,不停的成长自己的技能树,直到往下深入到最底层。
言归正传:
网上很少有关于电机参数自整定的系统总结,不知道是为啥,可能都喜欢藏着掖着把,我就大概总结一下,这篇文章会不定时更新。后面会插入一些代码,毕竟有代码的文章才是好文章。
参数自整定技术是指驱动器通过特定算法和运行流程,将伺服系统中的电气设备如电机、电缆、电气接触件等的电气参数,以及转动惯量、负载力矩、摩擦力等机械参数进行辨识,并作为驱动器运行配置参数。
伺服驱动器参数自整定内容见表3-11。
表3-11伺服驱动器参数自整定
参数名称符号标识极对数Npp电感L电阻R反电势系数Ke力矩系数Kt电流环比例系数CurrKP电流环积分时间常数CurrTi电机零相位角AbsCal转子转动惯量Jrot负载转动惯量JLoad摩擦力BLoad速率环比例系数MovKP速率环积分时间常数MovTi位置环比例PosKP下面对参数自整定算法进行简要描述:
a) 绕组电阻R
当电机转子静止时,绕组中没有反电势,绕组电压方程如下:
(3-1)控制器输出电压 U 为方波信号,具有高频交流量,导致相电流存在纹波,电流导数不为0,即
所以电阻和电压不呈现线性关系
电机绕组在不同均值的方波驱动电压下(占空比接近极小值和极大值时除外),电流的纹波是相同的,所以可利用以下原理辨识出电机绕组电阻:
 (3-2)
(3-2) (3-3)
(3-3)其中 INI_{N} 为电机额定电流; UNU_{N} 表示相电流等于额定电流时对应的电压; IripI_{rip} 表示施加电压为0.5 UNU_{N} 时对应的相电流。
将(3-2)式减去(3-3)式可得:
 (3-4)
(3-4)由于电流纹波相同,可知
所以绕组可通过如下公式计算得到:
(3-5)用程序实现电阻辨识的基本原理如图3-10所示。
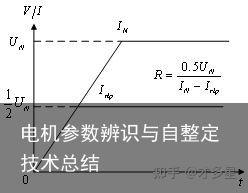 图3-10 电阻辨识原理
图3-10 电阻辨识原理b) 电机绕组电感L
根据转子静止时的电压方程,可得到电流动态方程和传递函数如下:
动态方程:
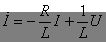 (3-6)
(3-6)传递函数:
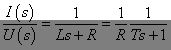 (3-7)
(3-7)电机绕组中电流对相电压的响应为一阶惯性环节,时间常数
一阶惯性环节的阶跃响应曲线如图3-11所示:
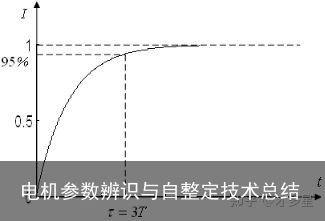 图3-11 一阶惯性环节的阶跃响应曲线
图3-11 一阶惯性环节的阶跃响应曲线由自动控制原理可知,阶跃响应上升到稳态值的95%时,需要的时间为
通过驱动器给电机施加电压 UNU_{N} ,测量电流达到0.95 INI_{N}
经过的时长τ,反推出电机的电气时间常数,进而解算出绕组电感。电感的辨识方程为:
(3-8)电机电阻和电感参数自整定流程如下:
在两相静止坐标系对电机进行电压矢量控制,给电机按照给定规律施加 UaU_{a} 和 UβU_{β} 电压矢量,当电流稳定时,记录对应的电流值;根据:
计算得到电机电阻值;
再给电机施加UaU_{a} 和 UβU_{β}电压矢量,记录电流达到稳定值的时间,使用上述原理的等效模型和获取的时间、电阻参数,计算得到电机电感参数。
c) 电机极对数和编码器位数自整定
电机极对数和编码器位数自整定方法如下:
控制电机工作在定子电压矢量旋转模式,电压矢量幅值为能产生额定电流对应的电压值;
在每个控制周期循环中,按照给定规律增加定子电压矢量角度,电机开始正向缓慢旋转,同时检测编码器数据;
当编码器数值第一次出现最大值到最小值的突变时,记录该最大值,根据该最大值计算出编码器位数,同时记录该时刻的参考电压矢量角;
电机继续旋转,定子电压矢量角每增加2π,极对数增加1,当编码器数值再次出现最大值到最小值的突变时,矢量角经历的2π循环的次数即为电机极对数。
d) 电机转子零相位角自整定
在自整定获取了电机电阻和电感参数、电流环参数后,电机转子零相位角自整定需,其流程如下:
控制电机工作在定子电流矢量旋转模式,电流矢量幅值为电机额定电流;
每个循环控制周期,按照给定规律增加定子电流矢量角,电机开始正向缓慢旋转,同时检测编码器数据;
当编码器数据出现最大值到最小值的突变时,记录该时刻的电流矢量角;
当转子旋转多圈后,每次编码器数据从最大值到最小值的突变均记录一次电流矢量角;
将记录的多组电流矢量角进行平均,再换算为对应的机械角度,即为电机转子的零相位角。
e) 反电势系数和力矩系数辨识
反电势系数和力矩系数辨识流程如下:
在使用参数自整定算法获取了电流环控制参数后,使电机在两相旋转d-q坐标系的电流环模式下工作;
使电机d轴电流闭环,给定
同时,在q轴按照给定规律施加电压,电机将加速旋转,记录电机分别达到二分之一额定转速和额定转速所对应的电压值,
根据b)得到的电压值和对应转速计算电机反电势系数;
根据电机反电势系数与力矩系数的特点关系,计算力矩系数。
f) 转动惯量辨识
电机在做加速运动和减速运动的时候,电磁转矩和负载的方向是不固定的。电机的机械运动方程如下:
加速过程:
(3-9)减速过程:
 (3-10)
(3-10)为了准确辨识出转动惯量,需要考虑到负载力矩的影响,对负载做如下的等效处理。
加速过程的运动方程:
(3-11)加速过程中的等效转动惯量:
(3-12)减速过程的运动方程:
(3-13)减速过程中的等效转动惯量:
(3-14)电机转动惯量的估计方程如下:
(3-15)此辨识方法成立的条件为:
(3-16)转动惯量辨识流程如下:
给电机施加q轴正向电流
(电机额定电流),电机开始加速旋转,电机开始加速旋转,记录电机从
加速到
的时间
给电机施加q轴负向电流
电机开始减速,电机减速旋转,记录电机从
减速到
的时间
根据
计算出加速度a
根据
计算得到电机转子转动惯量。
负载转动惯量参数辨识采用遗忘因子最小二乘法来实现,其原理如下:
根据伺服系统动力学方程:
以 TMT_{M} 、 AMA_{M} 作为输入观测量,以系统负载转动惯量J作为被估计量,构建性能指标函数:
准则函数:
根据递推最小二乘理论构建负载惯量辨识算法如下:
加入遗忘因子 λ\lambda 的最小二乘辨识算法如下:
以上公式中:
负载转动惯量在线辨识的工作流程如下:
电机和负载工作在持续加速或持续减速模式,在加减速过程的每个电流环控制周期中记录转矩电流iq和加速度a
对电流和转矩电流iq和加速度a进行滑动滤波,降低解算噪声;
在每个控制周期中计算平均转矩和平均加速度,当平均加速度达到设定阈值后,使用上述最小二乘法模型计算L(k)、P(k)和J(k);
计算准则函数
当准则函数收敛后(小于设定阈值),辨识参数有效,更新参数辨识结果。
(3) 控制回路设计
。
。
。
。
。
。
受不鸟了,知乎的编辑器太难用了,要是能直接把word复制过过来就好了,后面的内容我就写提纲把,真么时间在这耗了。
需要完整文档的加我: caiduosing ,这是我的WX号,我直接免费发完整文档,也保持更新和代码发送。
1)电流环解耦控制
2)电流环参数设计
电流环参数自整定步骤如下:
1)首先选取控制模型开环传递函数的截止频率
2)求取截止频率处的相位裕度:
3)选取相位裕度
4)因此由以上两式可计算得到:
5)再根据截止频率定义:
。。。。。。。。。。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫