自动化系新青椒随笔-也说电机拖动与控制(电机拖动技术主要内容是)
头一次当青椒,第一学期稀里糊涂的很快就过去了。确实是各种任务重了很多,另一方面所学知识太有限,没办法上知乎写东西了。常常跟我的学生们感慨说,走上教研岗的第一天就是我技术和学识的巅峰期了,后面就是我个人走下坡路的时候了。
既然在自动化系任教职,那么自动化专业的本科教学就是一个绕不开的基本话题。这学期主要从事电机拖动与控制系统这门课的部分教学任务,以及担任了几次本科生毕业答辩、创新性实践项目的评委。
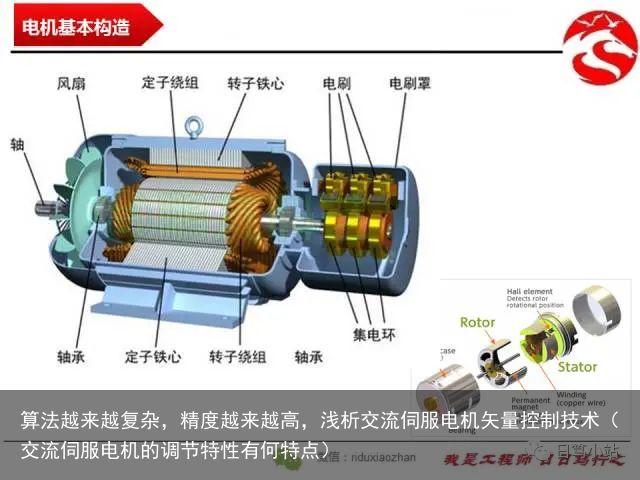
首先说电机拖动与控制这门课,确实是非常困难:既要懂电机原理,又要懂电力电子,还要懂经典控制原理。我对经典控制理论还比较熟悉,所以在这门课上担任了部分课时,但由于不懂电机的构造和电力电子,讲起来是十分吃力的。就说最简单的直流电机部分,需要从电机构造开始,抽象出描述其物理现象的动力学微分方程以便引出控制问题,由于我博士时候做过螺线管控制,和直流电机的模型很相似,问题还不大,可是一看课本头都大了!
(1)采用了电机工程师惯用的“静态特性模型”,再到“动态特性模型”等术语,直接给出了数学表达式,并没有给出其关联!我讲课的时候采取了先从微分方程到拉普拉斯变换得到传递函数即所谓“动态特性模式”,再使用终值定理得到其稳态增益,即“静态特性”。这是根据自动化系学生的知识背景来的,并没有采取求微分方程平衡点的方法。
(2)作者为了不同场合下描述的方便,采取的等效框图不一样,而且各个等效框图之间并没有给出推导。例如为了描述闭环控制下机械特性改变,采取一种框图;为了方便“双闭环控制”的绘图,又采用了另一种框图。虽说各种框图是等效的,但是其缺乏过渡,我第一次看是完全lost掉了的,甚至一度怀疑书上错了,自己重新推了公式才发现是对的。
(3)电力电子部分篇幅过大。这是我个人感受,不一定对,书本上也没介绍背景,突然就很突兀的说,需要“可控电压源”,然后就开始介绍各种拓扑结构和器件的电力电子技术,可是到了控制部分,就把这部分先简单的描述成为纯延迟环节,然后又说不方便分析,就又给简化成了一阶惯性环节。铺垫了这么多细节,只为了给被控对象增加一阶的动态,我觉得是属于维纳斯的手臂。
再到后来讲到双闭环控制,随便问一个控制系的学生,为什么要用双闭环?绝大部分只能泛泛的说“增加性能”,再深入一点的会背课本上的话说“内环快速抑制扰动,外环跟随指令”。即使是在课本上,对于其背后的深入的原理讨论也是很不充分的。说白了,双闭环的内环主要是为了降低由于大电感而造成的的从电压指令到实际电流的延迟效应,从控制系统上来说,是减少了一个比较大的延迟环节,所以控制性能会提高。
总的来说,电机控制确实是很难的一门课,在最新的知识重构的大讨论中,这门课的知识结构的合理性也有很多的碰撞。如果是想从电机、电力电子、控制三大块都让学生吃透的话,目前的学时是绝对不够的,也很难找一本知识点详细覆盖、深入浅出的教程。更重要的是,在目前这个工业时代,成熟的电机控制器结局方案也有很多了,再把它提到如此的高度,是否还能跟得上业界的潮流。
再说一点点和实践相关的,学弟学妹们的动手能力和十年前相比确实是有了飞跃。我当年引以为傲的一些经历和技能,比如参加过的竞赛和编程能力,到了今天已经成了人人必备的了,甚至是机械设计和加工能力也很让我吃惊。做的实践项目也从当年的基于xx单片机的yy系统,进化到了今天的深度学习目标识别的捞海参机器人、海底自动收放缆线机器人这种高大上的玩意儿了。我这个老学长已经落伍了。
彩蛋:学弟送给我的知乎头像印在PCB板上
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫