无人机动力系统中无刷电机的工作原理和测试方法(无人机无刷电机控制电路)
前言
我们在设计无人机时的第一步就是选择一台合适的电机。为了获得最佳性能,必须测试多台电机并根据你的设计选定最高效的电机。市场上有很多种类的电机,包括许多专为无人机设计的电机。本文仅在这里讨论有关无人机电动机方面的相关内容:
电动机的种类。无刷电机的工作原理。内转子和外转子。电机效率和性能。如何选择最高效的电机?【电动机的种类】
电动机分为四类:通用电动机、交流电动机、有刷直流电动机和无刷直流电动机。
通用电动机可能最不适合在无人机中使用。它效率低,速度调节差,只有在非常高的转速下才表现最好,这对于无人机应用不太理想,因为大多数无人机需要精确的速度调节才能稳定飞行。它们更常见于工业工具和家用电器中,例如钻头和吸尘器。
交流(AC)电机使用交流电来诱导其转子旋转,因此它通常需要插入墙上的插座里使用。如果借助电池使用,交流电机需要一个变压器才能运行。
另一方面,直流(DC)电机与交流电机非常相似,但它的接线方式是使用直流电而不是交流电。直流电机可以为无人机提供动力,但效果还是不如另一个候选者-BLDC电机。
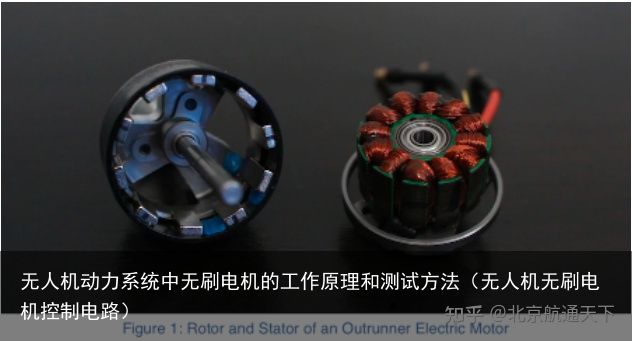
BLDC或无刷直流电机之所以如此命名,是因为它不像有刷直流电机那样需要使用电刷来工作。同使用电刷将电源与转子连接的有刷电机不同的是,BLDC电机不需要电刷,因为承载电荷的铜线圈被直接绕接到定子上。刷子本身是有刷电机的主要缺点,因为刷子会磨损并且需要也必须被维护或更换。无刷电机具有无人机设计所需的所有出色特性:高效率、宽速度范围和整体的高速转矩能力,相对低的成本和极少的维护也是其出色特性之一。
【无刷电机的工作原理】
在介绍无刷电机的工作原理前,我们先来了解其组成部分:
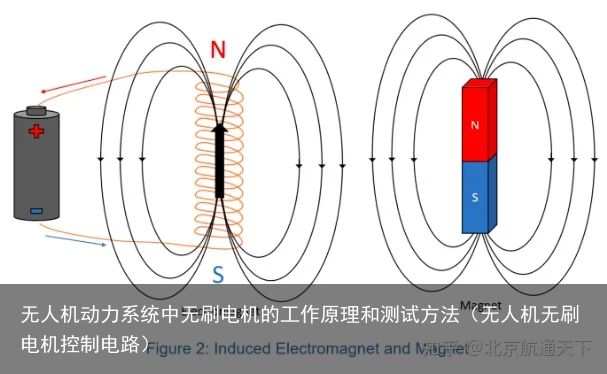
(1)电磁铁和永磁体
缠绕在金属底座上的导线不会像磁铁一样起作用,但是当电流流过导线时,它会诱导它像磁铁一样工作。这通常被称为电磁铁。如果相反的电流流过同一根电线,电磁铁会产生相反的效果,它会吸引另一个磁铁而不是把它推开。
(2)转子和定子
图3内圈上看到的部分是电磁铁,而在外圈上安装有永磁体。电机开动后通过向其线圈输送电流来激活其中的一个电磁铁,这将使转子开始旋转,因为永磁体受到类似电磁体的排斥并试图与定子上的相反永磁体对齐。当电磁铁和相对的永磁体对齐时,这只会使它旋转一小段距离。电机通过对下一个电磁铁供电来使转子保持旋转,然后继续不断供电下一个电磁铁,周而复始依此类推。
通过对电机以给定频率提供三相电流,转子将以等于该信号频率的速度旋转。无人机控制器上的油门用来控制电机的速度,加大油门会向无人机发送更高频率的信号。电子速度控制器(ESC)控制信号传递,根据油门的输入信号来调整电机的速度。

(3)电调的作用是什么?
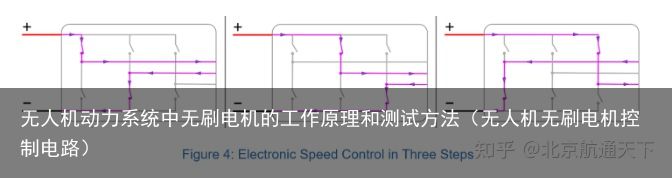
ESC或电子速度控制器通过提供电信号来控制电动机,这些变化的电信号被转换为转速的变化或反转。它使用直流电耦合开关系统来提供交流三相电流,然后通过改变电路中开关打开和关闭的速率来修改此输出电流。无刷ESC需要获知转子当前的位置信息才能启动电机并选择旋转方向。为了确定其位置,ESC使用来自最后一个未通电的电磁铁的信息来测量其电磁感应。上述感应的强度变化随着最近永磁体的位置变化而变化,距离永磁体越近,感应的磁场越强。
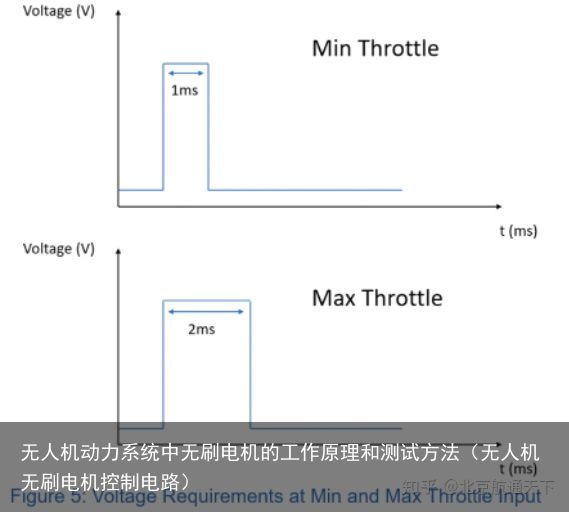
油门可以控制电机的转速,为此ESC必须根据油门信号去调整开关的频率。目前最常见的信号传输协议是Oneshot、Multishot和Dshot, 它们之间的主要区别在于所传递信号的频率,频率越大反应时间越快。此外,Dshot协议与其他两个协议不同的是它发送的是数字信号而不是模拟信号,对电噪声不敏感,因此信号传输更加稳定、精确,分辨率也更高。
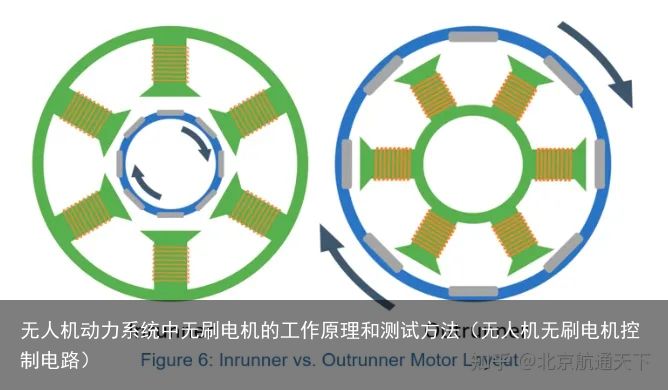
【内转子和外转子】
每个无刷电机都由两个主要部分组成,一个定子和一个转子。定子上固定有电磁体本身静止不动,转子是固定有永磁体的旋转部件。目前主要有两种类型的无刷直流电机:内转子型和外转子型。对于内转子电机,转子在定子“内部”旋转,或者相对于电机外壳进一步向内旋转。当转子在定子“外侧”或进一步向外旋转时,外转子电机具有相反的设置,见图6。两种型号在不同的应用中各有优缺点。当比较相同尺寸的内流道和外流道时,很容易看出所施加的力的直径是不同的。发生这种情况是因为电磁体比承载永磁体的转子占用更多空间。如果电磁铁位于内部,则与位于外部的情况相比,其直径更大(图6)。除了尺寸之外,对电机性能的影响也很重要。更大的直径意味着更大的扭矩,因为力施加在离旋转中心更远的地方,而更小的直径对于高转速来说会更好。因此,内旋桨在高速时运行最好,但产生的扭矩较小,而外旋桨在较大的螺旋桨上效果最好,因为它们可以输出更大的扭矩,但以较慢的速度旋转。
无人机行业的应用——根据上述原理,eVTOL因为需要高扭矩而会选择外转子来提供垂直拉力,而内转子常应用于需要提供高转速用以水平运动的喷气式涵道螺旋桨飞机或固定翼飞机。我们可以通过电机的Kv值(RPM/Volt)来更好的理解上述原理,即向电机发送的电压值每增加1V,电机的旋转速度相应的变化值,内转子电机具有相对较小的转子,在相同电压下旋转速度更快,所以内转子电机通常比同等尺寸的外转子电机具有更高的Kv值。当浏览无刷电机时,首先经常会看到的技术参数就是Kv值。
【电机效率和性能】
我们在探讨无人机时经常提及的一个性能就是续航时间,但非常遗憾地是目前最先进技术的电池在重量/能量的比值方面也都无法比及燃气发动机,所以唯一弥补上述不足的方案就是去选择使用电池最高效的电子元器件。我们可以通过多方面优化系统的能量消耗,其中一个就是提升电机的效率来提高无人机的重量/能量比,进而提升电机和无人机整机的操控性能。所以了解不同电机制造商之间的技术规格和品质差异变的至关重要,为了验证上述方法,我们对比了两种不同价格范围的同类型的BLDC电机。通过使用Tyto 1585系列测试台,同时运用配备的软件控制系统,我们测量采集了无人机系统的拉力、扭矩、电压、电流、转速和相关效率等性能参数。其中被测的两台电机分别是1500 Kv和2300 Kv的T2407电机,两个电机均使用的是7英寸,螺距为4的螺旋桨。
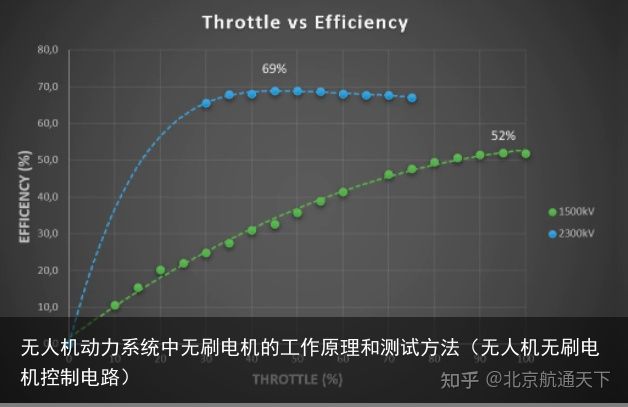
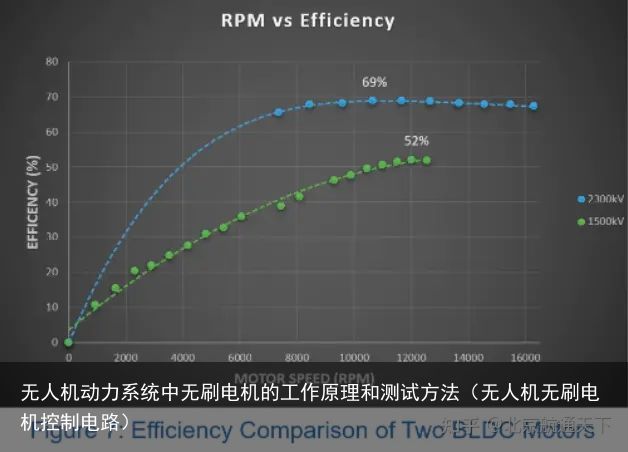
图7中的第一张图显示了两个电机的效率相对油门的趋势变化,第二张图是电机效率相对转速下的趋势变化。我们发现1500 Kv值的电机需要相对更大的油门才能有效运行,在使用相同螺旋桨的情况下2300 Kv值电机的效率会更高。另外2300 Kv值的电机的效率范围也更广,说明电机在低速和最高速度下都能保持较高的效率。
但从另一方面来说,较小Kv值的电机可以在低转速区间运行,并且可以高效地使用较小的螺旋桨。运输类无人机一般使用较小Kv值的电机,能够在低转速下保持空载和稳定,而对于竞速无人机,一个较大Kv值的电机即使在低转速下也可以很好地保持悬停。
所以为了更为全面和客观的对比不同的电机,我们需要知道无人机的用途和它运行的RPM。通过使用适合不同功能的螺旋桨进行全方位的数据测试,1500 Kv值的电机也可以做到更高效。
【如何选择最高效的电机?】
最后我们来谈谈选择电机时需要关注的事项,其中最重要的一项就是电机的Kv值,它描述了电机获得的转速随输入功率的变化量,例如一个2000 Kv值电机的输入电压每增加1V, 转速每分钟增加2000转。电机的外形尺寸与Kv值密切相关,宽而大的电机通常提供更高的扭矩但Kv值低,因而可以配备更大的螺旋桨;而薄而较长的电机具有更高的Kv值和较低的扭矩,因而比较适合小型螺旋桨。所以现实中较大的电机以较低的RPM运行,而小型电机会以相对较高的RPM运行。
电机的最大功率也是需要考虑的因素之一,因为一旦超过电机的功率限制会导致电机发热,从而大大降低其效率甚至有可能损坏电机。不同电机品牌的技术性能也是不一样的,相同Kv值的两个不同品牌的电机,其中一个品牌的电机可能就比另一个品牌的电机性能更好。这就是为什么在建造无人机之前,用户需要反复测试不同品牌的电机的原因。
结论
无刷直流电机是一项天才发明,它改变了电力推进领域的游戏规则。它们简单而流线型的设计,使遥控车和无人机等车辆能够以最大的控制力高效运行。
在本文中,我们介绍了电机的工作原理和其组成部分以及不同类型的BLDC电机。我们还介绍了电磁学以及ESC如何控制电机的转速。这些都有助于我们了解并根据无人机不同的应用用途去最大限度地提高电机的效率。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫











