非标设计基础:步进电机基础知识(步进电机属于哪一类电机型号)
1步进电机简介
步进电机又称为脉冲电动机或阶跃电动机,它根据输入的脉冲信号,每改变一次励磁状态就前进一定的角度,励磁状态不变时则保持—定位置静止。由此,步进电机可以将输入的脉冲信号转化为对应的角位移进行输出。通过控制输入脉冲的数量可以准确确定输出的角位移以实现定位的功能;而通过控制输入脉冲的频率可以准确控制输出的角速度而达调速的目的。因此在需要准确定位或调速控制时均可考虑使用步进电机。
1.1 步进电机分类
步进电机有反应式(VR型)、永磁式(PM型)、混合式(HB型)三种类型。
永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5°或15°,多半用于价格低廉的消费型产品。
反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和震动都很大,在欧美等发达国家20世纪80年代已被淘汰。
混合式步进是指混合了永磁式和反应式的优点,它又分为两相、三相和五相,两相步进角一般为1.8°,三相步距角为0.9°,而五相步进角一般为0.72°。混合式步进电机综合了前两种形式步进电机的优点,目前国内的装备制造业中所用步进电机基本都是混合式步进电机。
所以以下介绍的步进电机均指“混合式步进电机”。
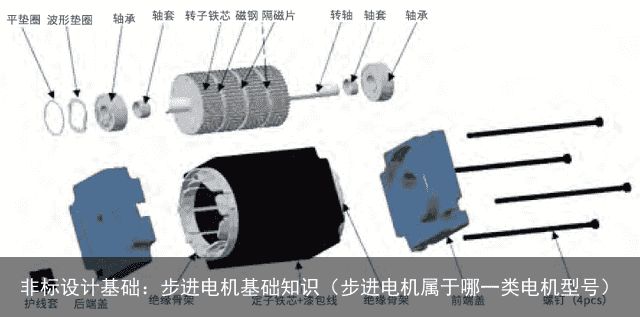
1.2 步进电机的结构
步进电机由转子(转子铁芯、永磁体、转轴、滚珠轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿;三相电机的定子有9个大齿,45个小齿,转子有50个小齿。
图1 步进电机组成示意图
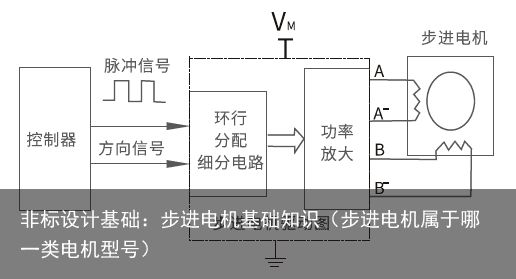
1.3 步进电机控制原理
步进电机无法直接连通电源工作,也无法直接接收电脉冲信号,它必须通过特殊的接口—步进电机驱动器来实现和电源、控制器的交互。步进电机驱动器(见图2)一般由环形分配器,及功率放大电路组成。环形分配器接收来自控制器的控制信号。每接收到一个脉冲信号环形分配器的输出就会转换—次,因此,脉冲信号的有无和频率就可以决定步进电机转速的高低、加速还是减速启动还是停止。环形分配器还必须监测控制器的方向信号,从而决定其输出状 态的转换是正序或反序,从而确定步进电机的转向。
图2 步进电机控制原理图
2步进电机的主要参数
2.1 机座号 主要有20、28、35、42、57、60、86等。
2.2 相数 步进电机内部的线圈数,步进电机相数一般有两相、三相、五相。中国使用的步进电机以两相为主,三相也有部分应用。日本则较多用五相步进电机。
2.3 步距角 对应输入—个脉冲信号,电机转子转过的角位移。步进电机的步距角计算公式如下:
式中:—步进电机的步距角;m—步进电机的相数;—步进电机转子齿数。
按照以上计算公式,两相、三相、五相步进电机的步距角分别是 1.80、 1. 20和0.72°。
2.4 保持转矩(静力矩) 是指电机定子绕组通额定电流,但转子没有转动时,定子锁住转子的转矩。保持转矩是步进电机的最重要参数,是电机选型主要依据。
2.5 定位转矩 是指电机没有通电流的情况下,用外力转动转子所需要的扭矩。该转矩是评价电机性能指标之—,在其它参数相同的情况下,定位转矩越小表示“齿槽效应” 越小,对电机低速运行的平稳性越有利。
2.6 矩频特性 主要指牵出矩频特性,电机稳定运行在某一转速时所能够承受不失步的 最大转矩。矩频曲线用来描述不失步的最大转矩与转速(频率)的关系。矩频曲线是步进电机的重要参数,是电机的选型主要依据之一。矩频特性曲线(见图3)。
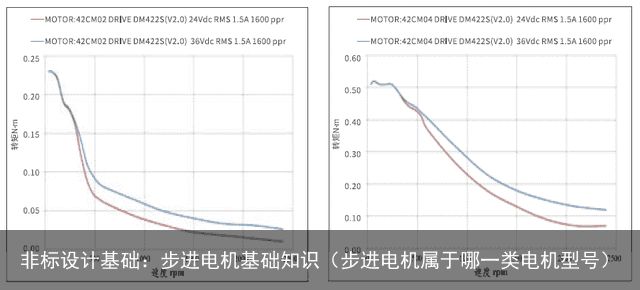
图3 步进电机矩频曲线图
2.7 额定电流 保持额定转矩,所需要的电机绕组电流有效值。
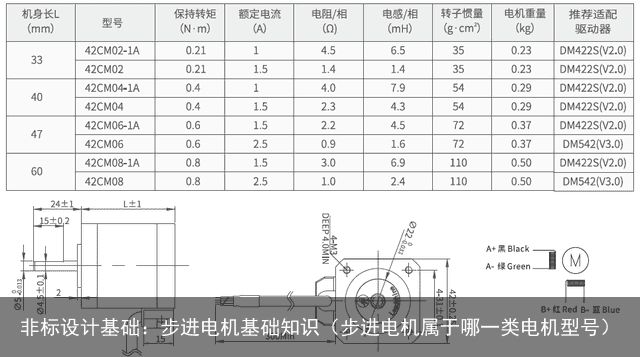
图4 步进电机参数表(摘自雷赛智能步进产品总型录2021-2022)
3 步进电机的选型步骤
工业应用中所用步进电机速度高达600~l5OO,更高转速,可考虑闭环步进电机驱动,或是选用伺服驱动方案较合适。步进电机选型步骤(见图5)。
图5 步进电机选型步骤

3.1 步距角的选择
如1.1所述,按照电机相数不同,有三种步距角:1.80(两相)、1. 20(三相)、0.72°(五相)。当然五相的步距角精度最高,但其电机及驱动器价格较昂贵,所以国内极少采用。再加上现在的主流步进驱动器都采用了细分驱动技术,在8细分以下,细分步距角精度还是可以保证的,所以如果单独从步距角精度的指标考虑,五相步进电机可以由两相或三相步进电机取代。
例如,在某种导程为5mm的丝杆负载应用中,如果采用两相步进电机,驱动器设置在8细分,则电机每转的脉冲数为200×8=1600个,脉冲当量为5÷1 600=0 .00313 mm=3 .13 ,此精度可以满足大部分应用要求。
3.2 静转矩(保持转矩)的选择
常用负载传动机构有同步带、丝杆、齿轮齿条等,首先计算其机器负载(主要是加速转矩加上摩擦转矩)折算到电机轴上所需负载转矩。然后按照电机所需最高运行速度,分以下两种不同使用情况选用合适保持转矩的步进电机:
(1)对所需电机速度300以下的应用:如机器负载折算到电机轴上所需负载转矩为 ,则此负载转矩再乘以一个安全系数SF(一般取1.5~2.0),即得到所需步进电机的保持转矩。
(2)对所需电机速度为300以上的应用:设最高转速,如机器负载折算到电机轴上所需负载转矩为,则此负载转矩再乘以安全系数SF(一般取2.5~3.5),即得到保持转矩。参考图6,初选一种合适型号。然后在矩频曲线进行查验对比: 在矩频曲线上,用所需的最高转速,查到此最高速度对应的最大失步转矩为,需满足比大20%以上。否则,需重新选定保持转矩大一个规格的电机,按照新选电机的矩频曲线重新查验对比。
3.3 电机的机座号选择
电机机座越大,其保持转矩越大。步进电机的常见机座号及保持转矩范围(见图6)。
图6 步进电机常见的机座号及其保持转矩
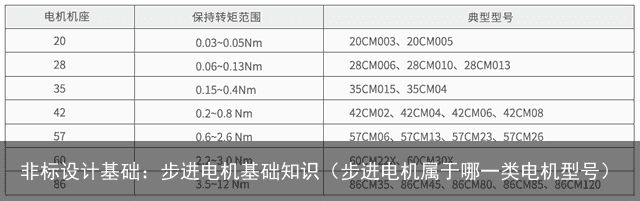
按照步骤(2)中计算得到的保持转矩,从图4中选择适宜的机座号及相应电机具体规格。
3.4 按照额定电流来选定配套步进驱动器
例如,某电机57CM23的额定电流为5A, 则你选配的驱动器的允许最大电流需5A以上(请注意是有效值而不是 峰值),否则你如果选了一款最大电流仅 3A的驱动器,则电机的最大输出转矩仅能 60%左右!
举报/反馈 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫