电动车三电技术之——无刷电机(电动三轮无刷电机原理)
在讲无刷电机之前我们先通过两个问题来了解无刷电机
问题一:为什么无人机和其他多功能直升机均使用无刷电机?
伴随国名经济的发展从四轮直升机到直升机以及滑翔机,现在市面上有很多类型的无人机,售价从几千到几百等等不一而同;所有这些飞行器都有一个共同的硬件。那就是采用无刷电机,为什么都采用无刷直流电机呢?
 图片来源于网络
图片来源于网络原因其一是:这些电机提供的扭矩非常高(单位重量比),这对于需快速获得/松动推力来起飞或降落无人机非常重要。这些电动机也可用作外圈(外转子模式),再次增加了电动机的推力。
原因其二是:选择无刷电机的它的平稳振动操作较少,这对我们的无人机在半空中稳定非常理想、尤其是在大风天气山区气流不稳地区尤为重要。
注:无刷电机的功率重量比非常高;而无人机上使用的电机应具有高功率(高速和高扭矩)以便空出载荷系数来装载电池、但重量也应较小。一般意思上可以提供与无刷电机相同的转矩和速度的其他直流电动机将是无刷电机的两倍重量。
问题二:为什么市面上电动汽车在重量及电池差异不大情况下对应续航里程差异很大?
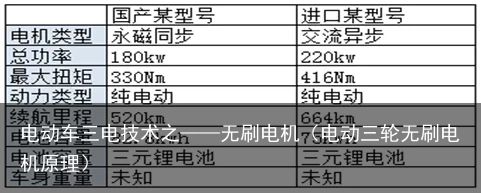
先抛开电池间差异性不谈,电动汽车是否足够高效节能、续航里程是否能满足日常行车需求是当前新能源场市场看重的部分。然而与交流异步电机相比,永磁同步电机具备高效区宽、功率密度以及扭矩密度高、体积小、控制简单等优点,对应当下永磁同步电机正受到各大车企的信赖。

接下来我们来了解电机之——直流无刷电机
名词解释
无刷直流电机顾名思义是电动机的一种;与其他电机类似总体机构上也分为两部分——由主体和驱动器组成、是一种典型的机电一体化产品。在控制上无刷直流电动机是以自控式运行的,所以不会像变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步、这是无刷电机的性能优势之一;在外形上稀土永磁无刷电动机的体积比同容量三相异步电动机缩小了一个机座号。同时区别于有刷直流电机其最大的结构特点是取消了碳刷换向机构;
结构特点
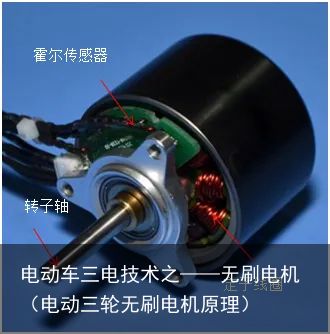
同其他电机类似无刷电机的定子绕组多做成三相对称星形接法。电动机的转子上安装有永磁体,在电动机内装有位置传感器来检测转子的位置。驱动器由功率电子器件和集成电路等构成,其功能是接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。近三十年针对异步电动机变频调速的研究还是在寻找控制异步电动机转矩的方法,稀土永磁无刷直流电动机将以其宽调速、小体积、高效率和稳态转速误差小等特点在调速领域显现优势。
 图片来源于网络
图片来源于网络同时无刷直流电机因为具有直流有刷电机的特性,也是频率变化的装置,无刷电机在我国的发展时间虽短,但是随着技术的日益成熟与完善得到了迅猛发展。尤其是应用在类似大疆无人机、各种无人船等对控制性能、功率推动比等要求高场合;在深圳、广州、北京等地形成初具规模产业链。
工作原理
无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。它具有可靠性高、无换向火花、机械噪声低等优点,结构组成上由永磁体转子、多极绕组定子、位置传感器等组成。位置传感按转子位置的变化,沿着一定次序对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换)。定子绕组的工作电压由位置传感器输出控制的电子开关电路提供。
 图片来源于网络
图片来源于网络结构上无刷电机也分转子和定子,只不过和有刷电机的结构相反;有刷电机的转子是线圈绕组,和动力输出轴相连,定子是永磁磁钢;无刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连(区分内转子电机和外转子电机),定子是绕组线圈,去掉了有刷电机用来交替变换电磁场的换向电刷,故称之为无刷电机(Brushless motor),
无刷电机的调速方法
方法一:用电压来操控速度,扭力主要由电流来操控,一般会带一个配套的电机驱动器,更改驱动器的輸出电压 就还可以操控无刷电机的速度,如果没有驱动器,想自已真接操控马达的话,需要看马达的功率和工作电流。
方法二:PWM控速,直流电机的PWM控速原理与交流电机调速原理不同,它不是通过调频方式去调节马达的转速,而是通过调节驱动电压脉冲宽度的方式,并与电路中一些相应的储能元件配合,更改了输送到电枢电压的幅值,从而达到更改直流无刷电机转速的目的。它的调制方式是调幅。PWM操控有两种方式:
1、采用PWM信号,操控三极管的导通时间,导通的时间越长,那么做功的时间越长,马达的转速就越高。
2、采用PWM操控信号操控三极管导通时间,更改操控电压高低来实现。
3、如果是小功率的马达还可以用电阻控速(不建议采用,方式非常简单,串联个电位器即可,只有这个方式会降低效率,因此不倡导),大功率的马达不能采用电阻操控速度,是因为这样需要一个小阻值大功率的电阻(马达工作阻值很小),这个电阻不好找而且这个方案效率太低,最好是还是找个配套的直流无刷电机驱动器。
无刷电机的性能参数
1、 KV,即RPM/V,用来描述电机转速与电压的关系是合适的。忽略了铜损/铁损/轴承阻力/空气阻力之后的理想电机模型,空载电流跟转速没有关系。
实际电机,电流确会随转速上升,但不是线性的(非正比关系)。而且电流的变化是结果,而不是原因。发生次序:电压提高-->转速升高-->涡流铁损增加/轴承阻力空气阻力增加-->负载扭矩增大-->电流升高2、 制动:制动是指除去油门后BLDC电机停止旋转的能力。这种能力对于多轴直升机非常重要,因为它们必须更频繁地改变它们的转速以在空中进行机动。
3、 软启动:当BLDC电机与齿轮相关时,软启动是一个重要的特性。当电机启用软启动时,它不会突然开始非常快速地旋转,无论油门给出多快,它都会逐渐增加速度。这将有助于我们减少与电机连接的齿轮(如果有的话)的磨损。
4、 电机方向:BLDC电机中的电机方向通常在运行期间不会改变。但是在组装时,用户可能需要改变电机旋转的方向。改变电机方向的最简单方法是简单地改变电机的任何两根电线。
5、 低电压停止:一旦校准,我们总是需要我们的BLDC电机以相同的特定速度运行以获得特定的节流值。但这很难实现,因为当电池电压降低时,电机往往会在相同的节流值下降低速度。为避免这种情况,我们通常将ESC编程为在电池电压低于阈值时停止工作。此功能称为低电压停止,在无人机中非常有用。
6、 响应时间:电机根据油门变化快速改变速度的能力称为响应时间。响应时间越短,控制越好。
7、 超前(Advance):超前是一个问题,或者更像是BLDC电机的错误。所有BLDC电机都有一些超前。也就是说,当定子线圈通电时,转子被吸引向它,因为它们上存在永久磁铁。在被吸引之后,转子倾向于在线圈断电之前在相同方向上向前移动一点,然后下一个线圈通电。这种运动被称为“超前”,它会产生抖动、温升、发出噪音等问题。所以一个好的ESC应该避免该问题。
8、 电调:其作用有2:[1]换向器,[2]占空比调节器。“电机被调节的”不是电流而是占空比;

无刷电机优势
1、无刷直流电机的外特性好,能够在低速下输出大转矩、可以提供大转矩启动;
2、无刷直流电机的速度区间大,任何速度下都可以全功率运行;
3、无刷直流电机的效率高、过载能力强;
4、无刷直流电机的再生制动效果好(加分点),由于它的转子是永磁材料,制动时电机可以进入发电机状态;
5、无刷直流电机的体积小,功率密度高;
6、无刷直流电机可采用全封闭式结构,可以防止尘土水滴类进入电机内部;
注一:关于进角,任何电机都可以调节,高进角,电机功率会提升,反之降低输出。 一些低感抗电机高电机,在运行中有可能会出现呛咳现象,可通过提高进角来解决,使动力输出稳定和 强劲。 每个电机都有个合适的进角范围,如果运行不畅和发热 或动力不连贯,可以通过调整进角解决。
注二:进角的调整如同汽车引擎的正时皮带,可以把进气气门调快一点,让引擎提前得到油气。而马达的进角,是要将碳刷与转子的接触面提前在磁力线之前。进角为0度或负度数的马达较无力,但较省电;有进角的马达较有力,但较耗电。进角的调整分为正向和反向调整,也就是正角度或负角度。
注三:影响电流的,是负载的轻重,即输出扭矩的大小。带大桨电流大正是因此。
注四:有刷 与 无刷,原理上并无本质区别。你把满油门的无刷ESC(控制器)看成铜片碳刷换向器就行,只不过它无磨损,不会产生火花和强烈EMI电磁干扰。此时电机端电压与有刷一样,就是接电源的那两根线上的电压,可测的。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫