电机及其控制综述与发展
“予何言,予思日孳孳”-禹
汇集中外新文章,新理论。进行翻译,整理,相关资料收集。
希望各位能提供好的文章和想法。
喜欢的话 关注 收藏 点赞 吧!!!
原文:
Review and Development of Electric Motor Systems and Electric Powertrains for New Energy Vehicleslink.springer.com/article/10.1007/s42154-021-00139-z#Tab10
作者:William Cai, Xiaogang Wu, Minghao Zhou, Yafei Liang & Yujin Wang
发表日期:2021.2.25
文章整体框架
 文章框架整理总结
文章框架整理总结本篇文章虽然主题是新电动汽车,但是整个框架与电机及其控制高度符合的,因此有很大的借鉴与参考价值。
从宏观上理清电机控制的发展脉络与实际应用。对于后续的研究提供了思路。
前言:在本篇文章中有些篇幅涉及电动汽车的结构,不是关注的重点,我会进行精简,有兴趣的可以看原文。
新能源汽车电机系统及电动动力系统的综述与发展
摘要
综述了近年来新能源汽车电机系统和电动动力系统的研究和技术进展。通过对直流电机、感应电机、同步电机的分析比较,发现永磁同步电机的综合性能更好;与采用 Si 基 IGBT 的转换器相比,我们发现采用 SiC MOSFET 的转换器显示出显着更高的效率并增加了每次充电的行驶里程。此外,还展示了不同控制策略和算法的优缺点。
新能源汽车对电驱动系统的要求
主要包括以下几个方面:
扭矩密度高,对车辆动态性能具有良好的扭矩控制能力满足车辆安全和寿命要求的可靠性和耐久性运行频谱内的高效率和高性价比的能源经济和用户投资。牵引电机的分类及特点
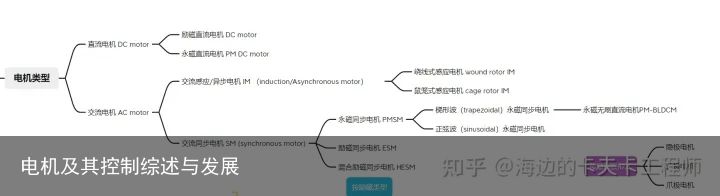 direct current motors (DCMs) 直流电机induction motors (IMs) 感应电机permanent magnet motors (PMMs) 永磁电机PM DC motor (PMDCM) 永磁直流电机PM synchronous motor (PMSM) 永磁同步电机PM brushless DC motor (PM-BLDCM) 永磁无刷直流电机PM hybrid excitation motor (PM-HEM) 永磁混合励磁电机switched reluctance motors (SRMs) 开关磁阻电机
direct current motors (DCMs) 直流电机induction motors (IMs) 感应电机permanent magnet motors (PMMs) 永磁电机PM DC motor (PMDCM) 永磁直流电机PM synchronous motor (PMSM) 永磁同步电机PM brushless DC motor (PM-BLDCM) 永磁无刷直流电机PM hybrid excitation motor (PM-HEM) 永磁混合励磁电机switched reluctance motors (SRMs) 开关磁阻电机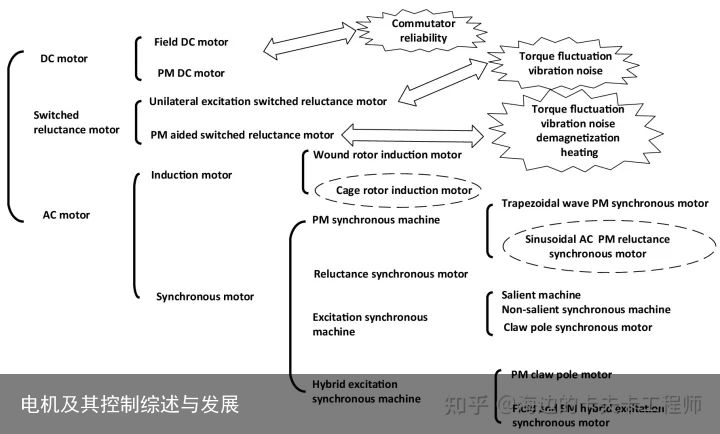 拖动电机的分类
拖动电机的分类直流电机 DCM
优点:
由于其简单的速度调节,DCM 从 19 世纪后期开始被用作电动汽车 (EV) 的牵引电机。
缺点:
电刷和换向器导致的效率低、质量大和可靠性差,使 DCM 不再适用于高速新能源汽车。它们仅用于低速电动汽车。
开关磁阻电机 SRM
优点:
SRM定转子由硅钢片叠片组成,采用凸极结构。转子上没有绕组、滑环或永磁体,定子上只安装了简单的集中绕组。转子结构使 SRM 能够简单、坚固、低成本和高速运行。此外,其逆变器可靠的拓扑结构可以防止其发生短路故障。高效率和简单的控制是 SRM 的优势。
缺点:
扭矩波动、噪音和振动严重阻碍了它在新能源汽车中的应用。
感应电机 IM
优点:
鼠笼式 IM 广泛用于新能源汽车。它们的定子和转子由叠片硅钢片组成,定子叠片组内插入三相绕组,转子槽内装有铝或铜排,两端带环。IM具有结构简单坚固、成本低、可靠性高、转矩脉动小、噪声低、免维护等特点。IM 可以轻松地以超过 15,000 rpm 的速度高速运行,并具有较宽的恒定功率范围。
缺点:
IM 控制电路复杂,其效率和功率密度与 PMSM 相比相对较低,导致其在全球的市场份额越来越低 。
永磁电机 PMM
永磁直流电机 PMDCM
当传统 DCM 的励磁绕组和磁极被 PM 取代时,就建立了 PM-DCM。PM-DCM 表现出更高的功率密度和效率,但由于换向器和电刷系统,它需要更多的维护,并且寿命和扭矩波动都很小;这些仍然是电动汽车应用需要解决的问题。
永磁同步电机 PMSM
在PMSM中,其三相绕组定子与IM或同步电机定子相同或相似,用PM代替传统同步电机的励磁绕组。根据永磁体在转子上或转子中的位置,永磁同步电机可分为表面贴装式(SPM)和内嵌式(IPM)。精心设计的IPM具有磁阻转矩大、效率高、功率因数高、发热低、结构简单、封装小、噪音低等特点。随着电力电子控制策略的发展,IPM 在牵引电机应用中占据主导地位。此外,由于采用全封闭结构,IPM 无需维护,具有低风摩擦损失和低风噪声。
永磁无刷直流电机 PM-BLDCM
PM-BLDCM在结构上和理论上都是一种特殊的PMSM,但它的绕组是正常集中的,定子电流波形是梯形(trapezoidal)的,而不是SPM中的正弦波(sinusoidal)。不需要换向器电刷系统。但在电气换向过程中会出现转矩脉动和噪声,很难达到超过基速两倍的最大速度。
永磁混合励磁电机 PM-HEM
通过在 PMSM 上增加励磁绕组,电机同时具有 PM 和励磁绕组,成为混合励磁电机,即 PM-HEM。该电机具有最小的磁通泄漏、气隙中的高磁通密度、高功率密度和良好的转矩-速度特性。然而,由于两个独立的激励,其拓扑和控制相对复杂。
电机性能对比
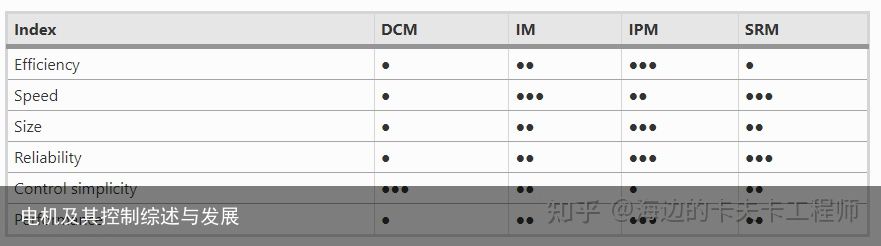 不同拖动电机对比表 ●、●●、●●● 分别代表低(差)、中和高(好)指数。
不同拖动电机对比表 ●、●●、●●● 分别代表低(差)、中和高(好)指数。可以见的PMSM在性能上是很优良的,也是今后的发展方向。
PMSM技术的发展
新能源汽车牵引电机的未来技术将着眼于高效、高转速、高功率密度、低振动噪声、更好的电磁兼容性(EMC)和低成本等关键因素。
在美国能源部提出的 EV 发展 2025 路线图中,EV 电机旨在实现高效率(97%)、高功率密度(50 kW/L)和低成本(3.3 $/kW)。
在《节能与新能源汽车技术路线图2.0》中,2025年的目标设定为比功率(功率质量比)5.0kW/kg,功率密度(功率体积比) 35 kW/L,牵引电机的峰值效率为 97%。
高槽填充率绕线技术
采用扁平线/矩形线或发夹式绕组的高槽填充率绕组,可大大降低绕组发热,绕组铜材利用率可提高15%~20%,这是主要的提高扭矩密度、功率密度和效率的方法。例如,GM VOLT电机通过发夹翼实现了4.6kW/kg的功率密度。
高速电机技术
电机尺寸与其扭矩成正比。对于具有给定功率要求的电机,其功率等于扭矩乘以速度。通过提高运行速度,可以降低电机对转矩的要求,从而减小电机的体积和重量,其功率密度随着速度的增加而增加。例如,特斯拉Model 3采用17900转/分的牵引电机转速,中国新能源汽车技术路线图2.0计划到2035年实现25000转/分的电机转速。
高效的热管理技术
油水联合冷却和新的冷却拓扑结构,改进牵引电机的冷却技术和传热,从而提高电机的功率密度。
下面是典型电机产品技术指标
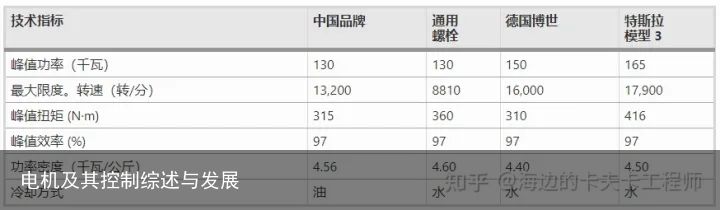 典型电机产品技术指标
典型电机产品技术指标电机控制研究
目前,永磁同步电机要求其控制策略具有系统动态响应快、动/静态精度高、抗干扰能力强等特点。然而,PMSM 模型是非线性的;其耦合性强、参数时变、变量多、扰动大,控制算法复杂。因此,电机的性能直接受到控制策略的影响。典型的控制策略包括恒压/频率比、经典比例积分微分 (PID)、磁场定向方法、直接转矩、滑模变结构、自适应和智能控制。
电机控制技术
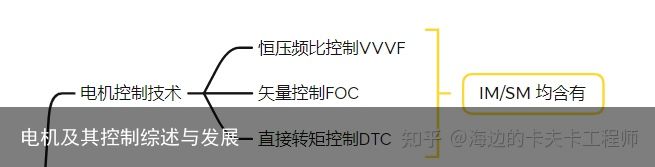
包括
VVVFFOCDTC恒定V/F比控制(VVVF)
恒V/F比控制,也称为恒磁通控制,可以通过保证每频率的定子电压保持恒定来获得恒定的磁通。NT坐标系采用状态反馈控制,提出了一种新的永磁同步电机无传感器V/F控制方法。当电机低速运行时,T轴电流用于保持系统的高稳定性。为了使电机在中高频下稳定运行,增加了速度稳定环,并提取了有功功率扰动分量进行补偿。
V/F控制是一种比较常用的IM速度控制方法,具有简单、有效、对参数变化鲁棒性高等优点。但是,由于是开环控制,在V/F开环控制中,由于速度和磁通的漂移会降低系统的控制精度、动态响应和负载能力,导致启动能力差,转矩脉动大,速度范围窄。因此,V/F控制很少用于车辆牵引电机控制。
矢量控制(FOC)
FOC 是 Blaschke 在 1970 年代提出的。在特殊的 dq0 坐标系中,定子电流被解耦为转矩分量并在恒定转子磁通下磁化,交流 (AC) 电机的控制可以等效于无励磁直流电机的控制。FOC 可实现平稳启动、低转矩脉动和宽速度范围,适用于机械在恶劣工况下的高动态响应。在两相旋转坐标系中建立电机动力学模型是 FOC 成功的关键,为恶劣工况下的高动态响应奠定基础。
海边的卡夫卡工程师:电机矢量控制原理本质理解及分析仿真119 赞同 · 15 评论文章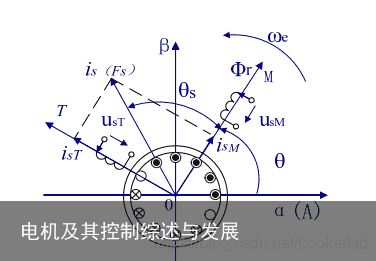
直接转矩控制(DTC)
DTC 是由 Depenbrock 提出的,去掉了 FOC 系统中的电流回路,不需要复杂的坐标变换。两位bangbang控件用于生成两相静态坐标中的PWM调制信号。DTC具有结构简单、动态响应快、参数扰动敏感性低、鲁棒性强等优点,适用于动态响应快、调速范围广的应用场合。但是,它也存在低速时电流和转矩脉动以及需要高采样频率的缺点。许多学者将空间矢量脉宽调制(SVPWM)和DTC结合起来减少这些纹波。
DTC 控制虽然简单,但具有出色的动态和静态性能。然而,它对逆变器开关频率的增加有限制。没有电流回路,电流保护应该直接完成,因此需要额外的测量来限制电流。“死区效应”在低速时也很明显,定子电阻的变化会扭曲定子电流和磁链。
海边的卡夫卡工程师:永磁同步电机直接转矩控制(PMSM-DTC)simulink仿真13 赞同 · 5 评论文章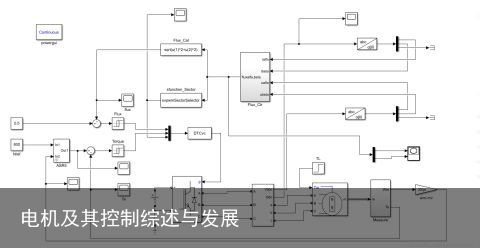
电机控制性能对比

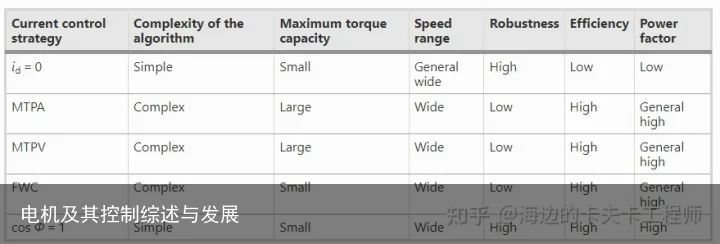
电流控制策略 Current Control Strategies (CCS)

PM 控制的策略包括
id = 0控制最大转矩电流比控制 maximum torque per ampere(MTPA)最大转矩电压比控制 maximum torque per volt(MTPV)弱磁控制 flux weakening(FWC)单位功率因数 unit power factor(cos Φ = 1)i d = 0 控制
这种控制策略的优点是算法简单、计算量小、无退磁效应,普遍适用于小功率伺服系统。但其功率因数较低。对于内部永磁同步电机,这种方法没有利用电机的磁阻转矩,降低了电机的转矩性能。因此,它仅用于表面贴装 PM 电机 (SPM)。
海边的卡夫卡工程师:永磁同步电机矢量控制(PMSM-FOC)仿真教程21 赞同 · 1 评论文章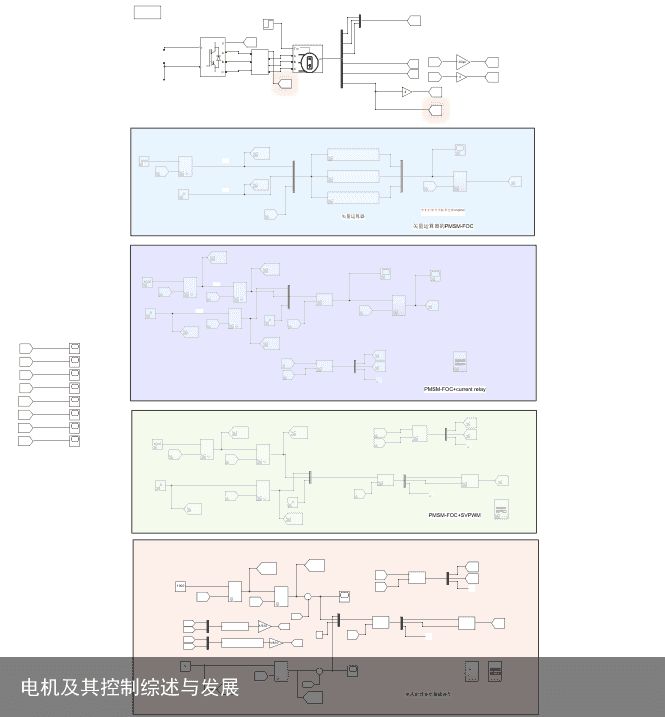
MTPA控制
MTPA策略充分利用了电机的磁阻转矩,极大提高了最大转矩输出。在输出转矩相同的情况下,这种方法的定子电流最小,减少了铜损,提高了效率。但是这种控制策略复杂,参数鲁棒性不是很高。
海边的卡夫卡工程师:永磁同步电机最大转矩电流比(PMSM-MTPA)Simulink仿真教程73 赞同 · 12 评论文章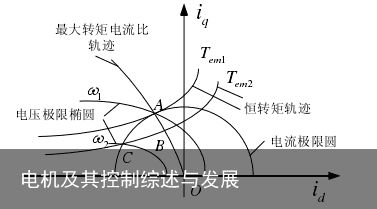
MTPV 控制
MTPV 充分利用电压限制椭圆和直流母线电压。这种方法可以实现逆变器容量高、弱磁范围内的最大输出转矩和快速的系统响应。但是,这种控制算法比较复杂。
FW 控制
基于cosΦ =1的单位功率因数控制 ,通过同时控制PMSM的d轴和q轴电流,使功率因数等于1,无无功输出。这种控制策略充分利用了电机逆变器的容量,但降低了其最大电机转矩容量。
电流控制策略性能比较
控制算法
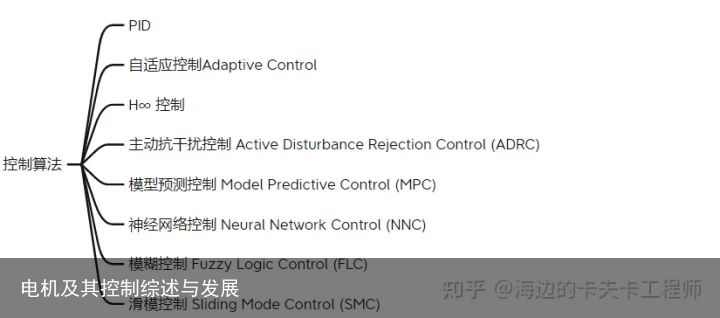 PID自适应控制Adaptive ControlH∞ 控制主动抗干扰控制 Active Disturbance Rejection Control (ADRC)模型预测控制 Model Predictive Control (MPC)神经网络控制 Neural Network Control (NNC)模糊控制 Fuzzy Logic Control (FLC)滑模控制 Sliding Mode Control (SMC)
PID自适应控制Adaptive ControlH∞ 控制主动抗干扰控制 Active Disturbance Rejection Control (ADRC)模型预测控制 Model Predictive Control (MPC)神经网络控制 Neural Network Control (NNC)模糊控制 Fuzzy Logic Control (FLC)滑模控制 Sliding Mode Control (SMC)PID
经典的PID控制方法稳定可靠,调节方便,结构简单,是线性和静止物体的好方法。然而,永磁同步电机是一个强耦合的非线性物体,其参数变化和相互作用复杂。为了提高电机调速性能,PID 控制与其他控制方法相结合,如自适应 PI、神经网络 PI 和模糊 PI 控制。然而,在电机转矩跟踪精度、响应速度、转矩脉动抑制和参数鲁棒性方面,上述算法无法有效实现出色的动静态性能。因此,提出了其他几种先进的控制算法。
主动抗干扰控制 Adaptive Control
自适应控制算法通过在线调整控制器参数来处理系统的不确定性,具有很强的鲁棒性。其中,模型参考自适应控制最为常见。其系统由参考模型、可调系统和自适应机制组成。然而,参考模型和可调系统的设计依赖于精确的电机模型,受到电机参数扰动的严重影响。
H∞
作为一种典型的鲁棒控制(RC)方法,H∞控制算法旨在最小化控制器不确定性的敏感性,以保持系统控制性能。它的鲁棒性和抗扰性都很强,但求解过程复杂。
主动抗干扰控制 Active Disturbance Rejection Control (ADRC)
ADRC 使用扰动观测器来估计系统的不确定性,然后将扰动抑制引入控制信号以补偿不确定性。ADRC 提供强大的抗干扰能力。但其观测器设计参数众多,逼近过程滞后,存在一定的稳态误差,影响电机控制精度。
模型预测控制 Model Predictive Control (MPC)
MPC设计简单,动态响应快。它的作用是基于在每个采样时刻在有限时间域中解决开环的最优控制问题。然而,这种控制算法很复杂并且取决于电机模型参数。
神经网络控制 Neural Network Control (NNC)
NNC方法可以实现启动平稳、转矩脉动小、速度范围宽、鲁棒性高,参数设置简单,自学习能力强,电机参数灵敏度低。但是,NNC结构相对复杂,在线迭代计算导致实时性差。因此,它更适合离线参数识别。
模糊控制 Fuzzy Logic Control (FLC)
FLC结构简单,鲁棒性好,对电机启动影响小。在交流伺服电机控制系统的设计中得到很好的应用。然而,在实际应用中,其设计依赖于经验和专业知识。
滑模控制 Sliding Mode Control (SMC)
SMC算法不受外界干扰的影响,结构简单,对内参扰动的敏感性低,控制精度高。它适用于非线性不确定系统的控制,但具有较高的转矩脉动。颤振、奇异性和不匹配的不确定性限制了它的应用。
控制算法性能比较
脉冲宽度调制控制
由于控制电机都需要通过逆变器,那么脉冲宽度调制PWM就需要采用。
空间矢量脉冲宽度调制 space vector pulse width modulation (SVPWM)正弦脉冲宽度调制 sinusoidal pulse width modulation (SPWM)六步电压 six-step voltage (SSV)对于给定的直流母线输入电压和相输出电流能力,高直流母线电压利用率可以帮助电机在转角速度和转角速度之后(即到弱磁范围)输出更多功率。
正弦脉冲宽度调制 SPWM
SPWM着重从电机电源的角度解决三相对称正弦电压频率和电压调节问题。然而,其总谐波失真比 SVPWM 大,对控制性能产生负面影响。更严重的是,其基波相电压幅值只能是直流母线电压的1/2,可能只能在转角速度之前的低速范围内使用。
空间矢量脉冲宽度调制 SVPWM
SVPWM 使电机获得恒定振幅的圆形磁场。与SPWM相比,直流母线电压利用率提高15.47%,高速运行时输出功率更大。还可以实现低电流波形失真或少量电流谐波分量。此外,旋转磁场更接近圆,大大提高了电机性能。因此,SVPWM 是电机控制中的主要调制方式。
六步电压 SSV
SSV可以通过控制电压幅值、磁通和转矩来调节功率,可以提供最高的直流母线电压利用率,从而有利于在超过电机转角速度的速度下有更大的功率输出。然而,其谐波在相电流和气隙磁场中丰富,导致具有更高幅度的五次和七次谐波。
不同脉冲宽度调制性能比较
电力电子设备
英飞凌、富士、三菱、瑞萨等国际元器件供应商推出了用于新能源汽车的新一代绝缘栅双极晶体管(IGBT)芯片。
例如,英飞凌 IGBT 基于 8 英寸。或 12 英寸。技术平台,而 IGBT 是在 6 英寸。或 8 英寸。晶圆在中国。尽管如此,在器件性能指标、关键工艺技术、生产质量控制、成本等方面仍存在一定差距。车用标准IGBT模块封装(相当于HP1、HP2、HP Drive等进口模块)在性能和可靠性上接近国际平均水平,在汽车上的大规模应用在国内刚刚起步。
与传统的硅器件相比,以碳化硅和氮化镓为代表的宽带隙(WBG)功率器件在电压、工作温度、开关频率、开关损耗等方面表现出很强的优势,更适用于需要耐高温、高压的新能源逆变器、高频和高功率密度 。
Si、SiC 和 GaN 之间的材料特性比较
采用标准驱动电路,增加一个简单的耦合电路,驱动两个串联的碳化硅金属氧化物半导体场效应晶体管(SiC MOSFET),并使用限幅缓冲电路进行电压平衡。它具有成本低、结构简单、可靠性高等优点。
电机控制器开发
高效率、高密度、良好的EMC性能是电机控制器的发展方向。采用电力电子集成技术,可以有效减轻整个控制器的重量和体积,提高功率密度,降低制造成本。
电力电子集成技术主要分为三个层次:
monolithic integration 单片集成hybrid integration 混合集成system integration 系统集成混合集成方案主要用于电机控制器,如丰田普锐斯和通用伏特。模块封装、互连和高效冷却是电力电子混合集成的核心。
不同电机控制器性能比较
先面的部分是新能源汽车动力系统开发,不是我研究重点,我会简要的概述。
电动汽车(BEV)动力系统一般包括电机、电力电子控制系统和减速器或变速器。其配置主要取决于车内电驱动系统的布局。
电驱动系统可分为
单电机驱动系统(或整块电子驱动系统)分布式电力驱动系统增程式电动车(EREV 或 REEV)系统Advantages/disadvantages of BEV drive systems
发动机、电动机和动力电池相结合,并匹配和优化两种动力源,大大减少车辆排放和化石能源消耗,根据动力源的组合,
HEV动力总成可分为
串联并联串并联复合Advantages/disadvantages of hybrid drive systems
新能源汽车电驱动系统技术创新与发展趋势
电驱动系统核心材料技术创新电力电子创新电机及动力系统创新总结
系统地回顾了新能源汽车电机系统和动力总成技术的现状;详细总结了材料、器件、动力总成等方面的技术创新和应用;并比较了不同的控制算法。虽然牵引电机和动力总成产品的性能得到了显着提升,但更多创新技术需要更多的研发,例如电机设计优化和控制算法、多物理仿真分析、鲁棒性设计、联合考虑电机、控制器和减速器的系统集成/transmissions,基于碳化硅器件的下一代电机系统,少用或不用重稀土永磁材料的永磁电机,高效的电机冷却方法,以及新材料的开发和应用。
下面为名词对照表
ADRC: Active disturbance rejection control AC: Alternating current APU: Auxiliary power unit CM: Common mode CMEMI: Common-mode electromagnetic interference DC: Direct current DP: Dynamic program DTC: Direct torque control EMI: Electromagnetic interference EV: Electric vehicle FEM: Finite element method FLC: Fuzzy logic control FOC: Field orientation control JJE: Jing-Jin Electric HEV: Hybrid electric vehicle ICE: Internal combustion engine IGBT: Insulated-gate bipolar transistor IM: Induction motor MOSFET: Metal–oxide–semiconductor field-effect transistor MPC: Model predictive control NEV: New energy vehicle NNC: Neural network control PHEV: Plug-in hybrid electric vehicle PID: Proportion integration differentiation PM: Permanent magnet PM-BLDCM: Permanent magnet brushless direct current motor PM-HEM: Permanent magnet hybrid excitation motor PMDCM: Permanent magnet direct current motor PMM: Permanent magnet motor PMSM: Permanent magnet synchronous motor RC: Robust control SMC: Sliding mode control SOH: State of health SRM: Switched reluctance motor SPWM: Sinusoidal pulse width modulation SSV: Six-step voltage SVPWM: Space vector pulse width modulation V/F: Voltage per frequency WBG: Wide bandgap WLTC: Worldwide light-duty test cycle喜欢的话 关注 收藏 点赞 吧!!!
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫

](http://img2.94zc.com:1799/uploads/2023-04-27/1682576798895.png)