高性能电机驱动:控制技术
上期内容:高性能电机驱动:调制技术
 美国芯源系统有限公司(MPS)招聘
美国芯源系统有限公司(MPS)招聘
Field Application Engineer(FAE) 现场应用工程师
Assistant FAE(AFAE) 助理现场应用工程师
联系人:黄小姐 028-87303000-3651
或联系:深圳FAE 曾忠 136-0256-3071
邮 箱:Nash.Zeng@monolithicpower.com
点击文末“阅读原文”获取详情科技前沿本文主要介绍感应电机驱动技术的现状及发展趋势,包括两电平、多电平的电压源型逆变器、电流源型逆变器和直接交交变流器的拓扑技术、调制方法和电机控制与估计技术。
关注公众号后,回复“高性能电机驱动”查看英文原文
高性能电机驱动:控制技术 电机负荷约占全社会用电的60%,电机的功率从小于1W到几十MW。驱动控制系统需要满足的技术要求包括:1高转换效率2宽运行范围,包括角速度、转矩、加速度、角度、线性位置3当控制或干扰信号变化时,能够快速消除误差4在非满负荷运行时,电机拥有最大的能效比5可靠,操作简便电力电子技术为交流电机在高性能驱动系统中替代直流电机铺平了道路。现代电力电子技术起源于美国GE公司1958年研发成功的可控硅整流器,即晶闸管。此后,半导体结构、材料、工艺的提升显著地推动了大功率、高性能电力电子器件的大规模应用。今天,最常用的电力电子器件是金属氧化物半导体场效应晶体管MOSFET和绝缘栅极双极性晶体管IGBT,在更高功率场合使用最多的则是集成门极换流晶闸管IGCT。如今,更耐高压、高频、高温的宽禁带SiC器件正在逐步走向市场。随着器件技术的进步,电力电子技术获得了飞速的发展。
电机负荷约占全社会用电的60%,电机的功率从小于1W到几十MW。驱动控制系统需要满足的技术要求包括:1高转换效率2宽运行范围,包括角速度、转矩、加速度、角度、线性位置3当控制或干扰信号变化时,能够快速消除误差4在非满负荷运行时,电机拥有最大的能效比5可靠,操作简便电力电子技术为交流电机在高性能驱动系统中替代直流电机铺平了道路。现代电力电子技术起源于美国GE公司1958年研发成功的可控硅整流器,即晶闸管。此后,半导体结构、材料、工艺的提升显著地推动了大功率、高性能电力电子器件的大规模应用。今天,最常用的电力电子器件是金属氧化物半导体场效应晶体管MOSFET和绝缘栅极双极性晶体管IGBT,在更高功率场合使用最多的则是集成门极换流晶闸管IGCT。如今,更耐高压、高频、高温的宽禁带SiC器件正在逐步走向市场。随着器件技术的进步,电力电子技术获得了飞速的发展。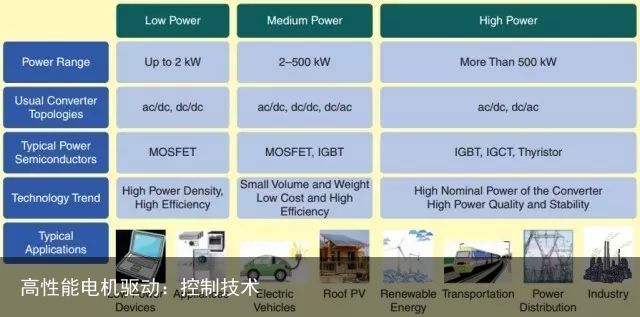 本文对高性能电机驱动电路的控制技术进行综述,重点介绍了常用的转矩控制方法以及几种典型的磁链观测器。调速型的高性能交流电机驱动系统的通用控制架构如下图所示。
本文对高性能电机驱动电路的控制技术进行综述,重点介绍了常用的转矩控制方法以及几种典型的磁链观测器。调速型的高性能交流电机驱动系统的通用控制架构如下图所示。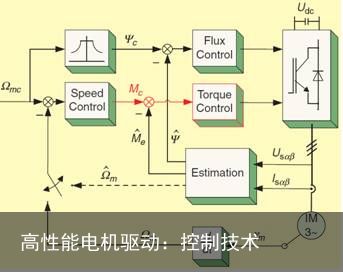
控制系统的外环速度控制环是相似的,主要产生转矩指令和磁链指令,而磁链和转矩可采用多种方法进行估计。速度信号可通过速度/位置传感器进行测量,也可通过估算方法来实现无速度传感器运行。现有文献提出的转矩控制(Torque Control,TC)方法不胜枚举,但只有少部分获得了应用。本文仅对工业界常用的控制策略进行介绍。本文将现有的TC方法分为线性控制、非线性控制。虽然是基于感应电机驱动来讨论TC,但这些方法也可以拓展到永磁同步电机控制。A
线性转矩控制器线性转矩控制器(Linear TC)和电压型PWM调制一起配合运行。控制器计算一个采样周期内所需的定子电压矢量平均值。最终,电压矢量由PWM技术合成,通常是SVM调制技术。因此,区别于处理瞬时值的非线性TC,在线性TC中,线性PI控制器控制一个采样周期里的平均值。因此,采样频率可以从非线性TC所需的40kHz减小到线性TC所需的2-5kHz。在这类线性TC中,本文评述了以下TC:磁场定向控制,基于电压型SVM调制的直接转矩控制和基于磁链型SVM调制的直接转矩控制。1、磁场定向控制FOCHasse和Blaschke在20世纪70年代提出了磁场定向控制(Field-Oriented Control,FOC),其基本思想是利用坐标变换,将交流电机等效为一台旋转的直流电机进行控制。直流电机的励磁绕组、电枢绕组是独立的,磁链、转矩可分别通过励磁电流、电枢电流进行独立控制,即磁链和转矩电流在电路和磁路上是分开的。相反,鼠笼式感应电机只有一个三相定子绕组,其定子电流矢量要同时用于控制磁链和转矩。因此,定子电流矢量中的励磁电流、电枢电流是相互耦合的(非独立的),不能独立控制。通过在转子磁场定向的坐标系上把瞬时定子电流矢量分解为磁链电流和转矩电流两个成分可实现解耦,如下图所示。 这样,感应电机的控制就和单独励磁的直流电机等效了,且可以通过PI控制和电压型SVM调制的电流可控PWM逆变器实现。FOC的核心是坐标变换,通过αβ/dq变换计算磁链电流分量Isd、转矩电流分量Isq,通过dq/αβ变换计算参考电压矢量Vsαc、Vsβc。因此,利用磁场定向控制,磁链、转矩可通过磁链电流分量、转矩电流分量进行间接控制。2、电压型SVM调制的直接转矩控制定子磁链坐标系下含转矩、磁链闭环的DTC-SVM系统控制框图如下所示。
这样,感应电机的控制就和单独励磁的直流电机等效了,且可以通过PI控制和电压型SVM调制的电流可控PWM逆变器实现。FOC的核心是坐标变换,通过αβ/dq变换计算磁链电流分量Isd、转矩电流分量Isq,通过dq/αβ变换计算参考电压矢量Vsαc、Vsβc。因此,利用磁场定向控制,磁链、转矩可通过磁链电流分量、转矩电流分量进行间接控制。2、电压型SVM调制的直接转矩控制定子磁链坐标系下含转矩、磁链闭环的DTC-SVM系统控制框图如下所示。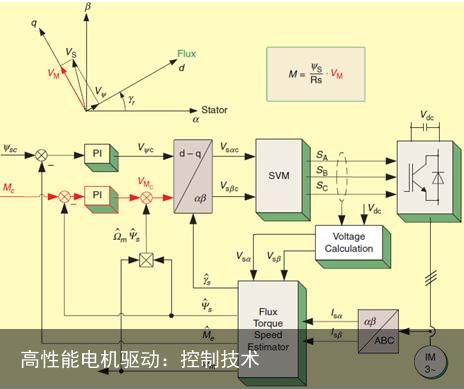 在定子磁链定向坐标系上,磁链、转矩PI控制的输出即为定子电压指令分量VΨc、VMc。该方法可看做是一种简化的无电流控制环的定子磁场定向控制方法;也可看做是把下图中基于矢量选择表的DTC算法(Vector Selection Table based DTC,VST-DTC)中的开关表替换为SVM,把滞环转矩、磁链控制器替换为线性PI控制器的方法。
在定子磁链定向坐标系上,磁链、转矩PI控制的输出即为定子电压指令分量VΨc、VMc。该方法可看做是一种简化的无电流控制环的定子磁场定向控制方法;也可看做是把下图中基于矢量选择表的DTC算法(Vector Selection Table based DTC,VST-DTC)中的开关表替换为SVM,把滞环转矩、磁链控制器替换为线性PI控制器的方法。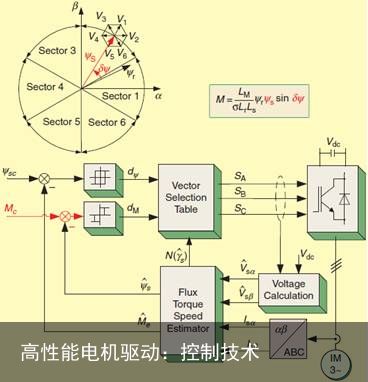 在DTC-SVM算法中,转矩、磁链都是通过闭环直接控制。因此,需要精确地估计电机的磁链和转矩。与基于滞环控制的DTC相反,DTC-SVM算法的开关频率固定,这有利于减小转矩、磁链脉动,提高启动过程和低速运行的可靠性。3、磁链型SVM调制的直接转矩控制采用磁链型SVM调制可进一步简化DTC算法,如下图所示。
在DTC-SVM算法中,转矩、磁链都是通过闭环直接控制。因此,需要精确地估计电机的磁链和转矩。与基于滞环控制的DTC相反,DTC-SVM算法的开关频率固定,这有利于减小转矩、磁链脉动,提高启动过程和低速运行的可靠性。3、磁链型SVM调制的直接转矩控制采用磁链型SVM调制可进一步简化DTC算法,如下图所示。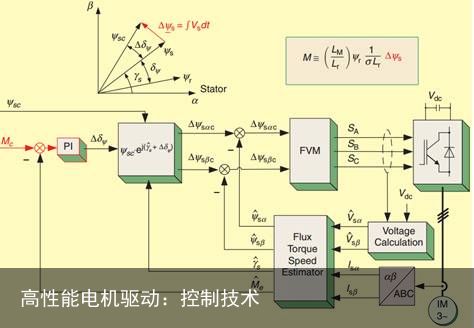 该方法采用PI控制进行转矩调节,其输出即为转距角增量ΔδΨ。假设转子磁链幅值是近似相等的,通过控制转距角δΨ可控制转矩。转矩角对应于定子磁链矢量ΔΨs的增量。定子磁链矢量指令通过估计的磁链位置γs
该方法采用PI控制进行转矩调节,其输出即为转距角增量ΔδΨ。假设转子磁链幅值是近似相等的,通过控制转距角δΨ可控制转矩。转矩角对应于定子磁链矢量ΔΨs的增量。定子磁链矢量指令通过估计的磁链位置γs
和转矩角增量相加得到。将定子磁链矢量指令和估计的定子磁链进行比较,其误差直接用于磁链矢量调制模块来计算VSI的开关状态。由于该方法在磁链PWM调制中采用了内环定子磁链环来计算误差,因此就无需DTC-SVM中的磁链PI控制器了。B
非线性转矩控制器非线性转矩控制器(Nonlinear TC)几乎摒弃了坐标变换思想以及类比直流电机控制的磁场定向控制思想,它的主要特点是采用bang-bang控制来代替解耦控制。Bang-bang控制这种开关控制特性非常适合控制电力电子变流器。与FOC方法相比,DTC算法有如下特点:1)、结构简单;2)、无电流环,无需直接调节电流;3)、无需坐标变换;4)、无需单独的电压PWM调制;5)、无需速度传感器;6)、需要精确的定子磁链和转矩估计。非线性转矩控制主要包括VST-DTC算法、直接自控制(Direct Self Control,DSC)和在线最优化模型预测DTC算法等。同时,神经网络和模糊逻辑控制器也属于非线性控制。1、基于矢量选择表的DTC算法VST-DTC在VST-DTC方法中,定子磁链幅值指令Ψsc和转矩指令Mc分别与其估计值进行比较。根据滞环控制器产生的数字化磁链和转矩误差dΨ,dM以及定子磁链位置N(γs),从矢量选择表(Vector Selection Table,VST)中选择合适的电压矢量。因此,逆变器的脉冲信号由VST产生。VST-DTC的主要特点包括:1)、正弦定子磁链和电流波形及其谐波成分由磁链和转矩滞环控制器的环宽决定;2)、转矩动态响应性能优异;3)、滞环宽度决定了逆变器的开关频率,且开关频率随速度和负载变化。目前,VST-DTC算法的研究主要集中在改善启动能力、过载能力、极低速运行特性、转矩纹波抑制能力、噪声抑制能力等技术性能方面。2、直接自控制DSCDSC算法的控制框图如下图所示。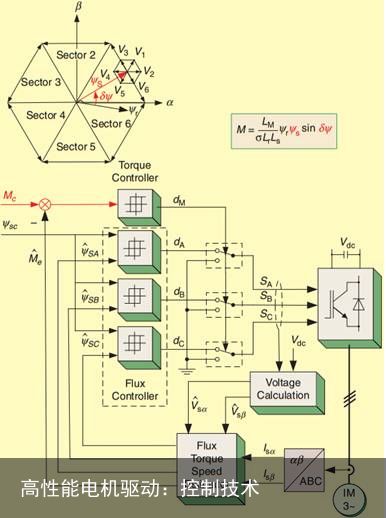 磁链比较器根据定子磁链指令和实际的三相磁链生成dA,dB,dC,这三个变量对应有效电压状态(V1-V6)。滞环转矩控制器产生信号dM,该信号决定零电压状态。因此,定子磁链控制器决定有效电压状态的作用时间,以保证定子磁链向指令轨迹移动,而转矩控制器决定零电压状态的作用时间,以保证电机的转矩在所定义的滞环环宽之内。DSC的主要特点为:1)、除了谐波外,产生的非正弦定子磁链和电流波形与PWM运行及六阶梯运行效果相同;2)、在PWM运行模式下,定子磁链沿着一个六边形移动;3)、无需电压预选,且逆变器的容量得到了充分利用;4)、逆变器的开关频率低于VST-DTC算法;5)、在恒功率和弱磁区都具有良好的转矩动态响应。需要注意的是,当磁链滞环宽度为14%时VST-DTC算法的特性与DSC算法几乎一致。3、基于模型预测控制的DTC算法预测控制是一类覆盖面非常宽的控制器,利用系统的模型(也叫预测模型)来预测并控制变量未来的状态,下图给出了简化的预测DTC算法框图。
磁链比较器根据定子磁链指令和实际的三相磁链生成dA,dB,dC,这三个变量对应有效电压状态(V1-V6)。滞环转矩控制器产生信号dM,该信号决定零电压状态。因此,定子磁链控制器决定有效电压状态的作用时间,以保证定子磁链向指令轨迹移动,而转矩控制器决定零电压状态的作用时间,以保证电机的转矩在所定义的滞环环宽之内。DSC的主要特点为:1)、除了谐波外,产生的非正弦定子磁链和电流波形与PWM运行及六阶梯运行效果相同;2)、在PWM运行模式下,定子磁链沿着一个六边形移动;3)、无需电压预选,且逆变器的容量得到了充分利用;4)、逆变器的开关频率低于VST-DTC算法;5)、在恒功率和弱磁区都具有良好的转矩动态响应。需要注意的是,当磁链滞环宽度为14%时VST-DTC算法的特性与DSC算法几乎一致。3、基于模型预测控制的DTC算法预测控制是一类覆盖面非常宽的控制器,利用系统的模型(也叫预测模型)来预测并控制变量未来的状态,下图给出了简化的预测DTC算法框图。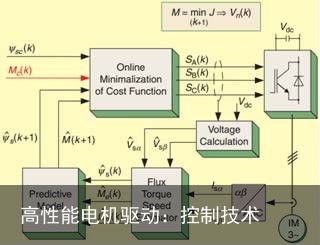 这种模型预测控制也被称为有限控制集模型预测控制(2L-VSI有7个开关状态)。与连续模型预测控制不同,有限控制集模型预测控制因可以通过在线地最小化目标函数来确定逆变器的开关状态,无须PWM调制。其中,目标函数通常定义为转矩误差和磁链误差的加权和。当然,也可以加入一些其他成分(如减少不必要的切换、进行频谱控制、保证多电平VSI的直流电容电压平衡,减小共模电压等)。模型预测控制的优点有:1)、简单,容易理解;2)、反映了模型的非线性;3)、易实现;4)、可根据具体的应用场合进行改进和扩展。当然,预测DTC的缺陷也非常多:1)、与经典控制相比,其在线计算量较大;2)、预测模型的精度直接影响到预测控制器的控制效果。与ABB采用的VST-DTC算法相比,Papafotiou提出的多步预测DTC算法的平均开关频率及其逆变器损耗减少了16.5%,同时能够保持控制性能不降低。因此,模型预测控制方法还是非常值得深入研究和推广的。4、神经模糊控制智能控制在电机驱动领域的应用研究越来越多。混合模糊逻辑与神经网络的控制方法因具有了两者的优点,因此有可能实现一些特殊的功能。然而,这一类思路还只是一种可供研究的方向,目前尚未有太多的工业应用,依然需要进一步研究。C磁链转速估计方法无论哪种控制方法,都需要非常准确的定子、转子磁链(幅值和相位)和转矩信息,一般都是通过估计方法间接获得。如果定子磁链可以精确地估计,转矩信息也就能精确地估算了。为了消除磁链传感器或测量线圈带来的成本和可靠性问题,学者们提出了间接磁链矢量计算方法,这就是所谓的磁链模型或磁链估计方法这些方法利用易于测量的定子电压、定子电流、速度或位置等信息来间接实现磁链估计。理想情况下,这些磁链模型产生的定子磁链和转子磁链矢量与电机的磁场同步旋转。由于电机参数值不一定准确,且电机参数会随运行工况而变化,电机的实际磁链和估计值会有误差。影响该误差的因素很多,例如:磁链模型,电机参数的偏差,输入信号的测量精度及电机的稳态工作点等。为了尽可能地减小磁链模型对电机参数变化的敏感性(也成为鲁棒性),可以采用模型参考自适应以及状态观测器的方法。下图是最早提出的磁链观测模型。
这种模型预测控制也被称为有限控制集模型预测控制(2L-VSI有7个开关状态)。与连续模型预测控制不同,有限控制集模型预测控制因可以通过在线地最小化目标函数来确定逆变器的开关状态,无须PWM调制。其中,目标函数通常定义为转矩误差和磁链误差的加权和。当然,也可以加入一些其他成分(如减少不必要的切换、进行频谱控制、保证多电平VSI的直流电容电压平衡,减小共模电压等)。模型预测控制的优点有:1)、简单,容易理解;2)、反映了模型的非线性;3)、易实现;4)、可根据具体的应用场合进行改进和扩展。当然,预测DTC的缺陷也非常多:1)、与经典控制相比,其在线计算量较大;2)、预测模型的精度直接影响到预测控制器的控制效果。与ABB采用的VST-DTC算法相比,Papafotiou提出的多步预测DTC算法的平均开关频率及其逆变器损耗减少了16.5%,同时能够保持控制性能不降低。因此,模型预测控制方法还是非常值得深入研究和推广的。4、神经模糊控制智能控制在电机驱动领域的应用研究越来越多。混合模糊逻辑与神经网络的控制方法因具有了两者的优点,因此有可能实现一些特殊的功能。然而,这一类思路还只是一种可供研究的方向,目前尚未有太多的工业应用,依然需要进一步研究。C磁链转速估计方法无论哪种控制方法,都需要非常准确的定子、转子磁链(幅值和相位)和转矩信息,一般都是通过估计方法间接获得。如果定子磁链可以精确地估计,转矩信息也就能精确地估算了。为了消除磁链传感器或测量线圈带来的成本和可靠性问题,学者们提出了间接磁链矢量计算方法,这就是所谓的磁链模型或磁链估计方法这些方法利用易于测量的定子电压、定子电流、速度或位置等信息来间接实现磁链估计。理想情况下,这些磁链模型产生的定子磁链和转子磁链矢量与电机的磁场同步旋转。由于电机参数值不一定准确,且电机参数会随运行工况而变化,电机的实际磁链和估计值会有误差。影响该误差的因素很多,例如:磁链模型,电机参数的偏差,输入信号的测量精度及电机的稳态工作点等。为了尽可能地减小磁链模型对电机参数变化的敏感性(也成为鲁棒性),可以采用模型参考自适应以及状态观测器的方法。下图是最早提出的磁链观测模型。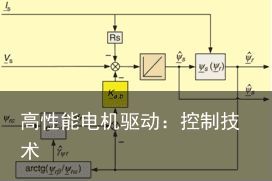 该方法无需测量速度信号,因此可用于无速度传感器控制场合。在极低转速下,由于定子电压信号几乎为零,磁链矢量由参考磁链产生。在高速时(由补偿增益K决定),电压信号起主导作用,磁链矢量由电压模型计算得到。该观测器可实现驱动系统的起动和制动。然而,该方法不能实现零速时的转矩控制。为了解决这一问题,学者们提出了新的磁链观测器,如下图所示。
该方法无需测量速度信号,因此可用于无速度传感器控制场合。在极低转速下,由于定子电压信号几乎为零,磁链矢量由参考磁链产生。在高速时(由补偿增益K决定),电压信号起主导作用,磁链矢量由电压模型计算得到。该观测器可实现驱动系统的起动和制动。然而,该方法不能实现零速时的转矩控制。为了解决这一问题,学者们提出了新的磁链观测器,如下图所示。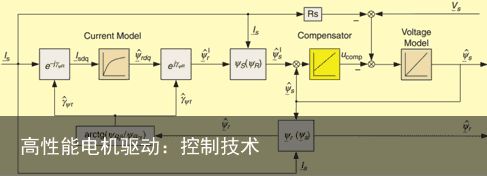 该定子磁链观测器也是根据电压模型进行计算,并采用在转子磁场同步旋转坐标系上的电流模型进行补偿。高速时,由于定子电阻减小,电压模型保证了可以获得更好的磁链估计精度,而在低速区,电流模型观测效果更好,甚至可以在零频下进行估计。两者之间的切换由产生补偿信号ucomp的PI控制器决定。下图给出的磁链观测器利用了电压、电流、转速,以及测量电流和估计电流之间的偏差。在这个观测器中,电机模型的输入为由定子磁链和转子磁链估计得到的电流矢量。测量的定子电流矢量仅仅用于PI控制器来计算补偿电压ucomp。当有运动传感器时,该方法在零速工况下也能保证良好的运行性能。本文论述的主要控制策略的性能对比和应用领域如下表所示。由此可知:在FOC和SVM-DTC中,控制信号由PWM调制给出,采样时间和开关时间相同,范围为50-500μs。其转矩上升时间大约为4到6个采样周期,且受开关频率的限制。结语
该定子磁链观测器也是根据电压模型进行计算,并采用在转子磁场同步旋转坐标系上的电流模型进行补偿。高速时,由于定子电阻减小,电压模型保证了可以获得更好的磁链估计精度,而在低速区,电流模型观测效果更好,甚至可以在零频下进行估计。两者之间的切换由产生补偿信号ucomp的PI控制器决定。下图给出的磁链观测器利用了电压、电流、转速,以及测量电流和估计电流之间的偏差。在这个观测器中,电机模型的输入为由定子磁链和转子磁链估计得到的电流矢量。测量的定子电流矢量仅仅用于PI控制器来计算补偿电压ucomp。当有运动传感器时,该方法在零速工况下也能保证良好的运行性能。本文论述的主要控制策略的性能对比和应用领域如下表所示。由此可知:在FOC和SVM-DTC中,控制信号由PWM调制给出,采样时间和开关时间相同,范围为50-500μs。其转矩上升时间大约为4到6个采样周期,且受开关频率的限制。结语
基于电力电子电路驱动的高性能交流电机控制技术属于现代高新科技,对于电机系统的节能和提高电机运行性能具有非常显著的技术性能和经济性能。本文回顾了电机驱动电路控制与估计技术的当前状态和发展趋势。本文将转矩控制方法分为线性控制器和非线性控制器。线性控制包括磁场定向控制、基于电压型SVM调制的DTC、基于磁链型SVM调制的DTC。非线性控制包括经典的基于查矢量表的滞环DTC,直接自控制、预测模型DTC,神经模糊控制等。此外,本文还介绍了几种典型的磁链观测器。
译者简介郭磊磊,工学博士,讲师,本硕博均毕业于合肥工业大学电气与自动化工程学院,师从张兴教授,主要从事大功率风力发电驱动技术研究,其与合肥阳光电源股份有限公司合作参与的国家“十二五”科技支撑计划——“7MW级风电变流器及控制系统产业化关键技术研发”(2012BAA01B04)首次在国内研发出7MW级风电变流器,并率先在湖南湘电风能集团通过地面实验测试。目前就职于郑州轻工业学院电气信息工程学院,主要从事交流电机驱动控制技术研究,发表论文10余篇,SCI收录2篇,申请发明专利6项,授权3项。本文版权属于作者,如转载,请联系公众号后台欢迎转发本文到朋友圈推荐阅读:点击下方标题即可阅读 欢迎分享您的优质资源让我们一起创造知识技术共享经济! 投稿邮箱为:ndy-weixin@niudunyan.com下期内容:EV用无线供电技术的研究进展敬请期待! 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫