什么是电机控制器?它是干嘛用的?
依据GB/T18488.1-2015《电动汽车用驱动电机系统第1部分:技术条件》,电机控制器的定义是:控制动力电源与驱动电机之间能量传输的装置,由控制信号接口电路、驱动电机控制电路和驱动电路组成。也就是将动力电池的直流电转换为交流电,并且控制整车控制器发送的目标扭矩和转速进行输出,电机控制器的结构图如图1所示。
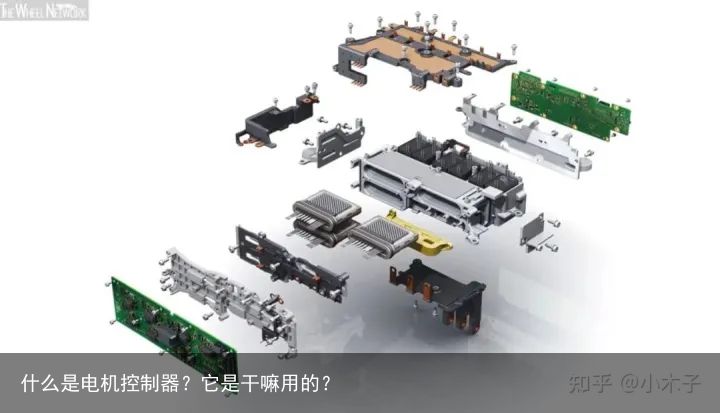 图1 电机控制器的结构图
图1 电机控制器的结构图01.电机控制器的硬件构成
电机控制器的硬件通常分为控制板和驱动板。控制板主要包括主控芯片、CAN网络、采样电路、旋变电路和电源电路等。
1.主控芯片
控制板的主控芯片以DSP或FPGA为主,在车载电机控制器中常用的英飞凌、恩智浦
、瑞萨为主。
英飞凌的Aurix系列,65nm工艺,32bit带宽,具有多个锁步核,最高主频达300MHz。常用的有TC2XX和TX3XX系列。
恩智浦的MPC5XX系列,55nm工艺,32bit位宽带锁步核的单核、双核架构,最高主频200MHz。
瑞萨的RH850系列,40nm工艺,32bit位宽带锁步核的单核、双核架构,最高主频240MHz。
CAN电路:CAN电路主要以CAN收发器芯片为主,提供电机控制器与外部的交互,常用的芯片有JTA1145,JTA1043等。
2.电源电路
电源电路主要将12V电转变成DSP和部分电路所需的电压,比如主控芯片的外设和内核供电,CAN收发器的供电等。常用的电源芯片包括:
英飞凌的TLF35584及其下一代,其满足ISO26262要求,通常厂家与Aurix主控芯片打包推荐。
NXP的FS6500,满足ISO26262要求,集成CAN收发器、电源管理、LIN总线收发器、自检诊断功能一体。
ST的L9788,满足ISO26262要求,集成CAN收发器、电源管理、LIN收发器、继电器驱动等功能。
TI的TS65381,满足ISO26262要求,集成CAN收发器、电源管理、自检诊断功能。
3.旋变电路
硬件解码电路以旋变解码芯片为标志,芯片有ADI的12XX系列芯和AU680系列为主。
AD2S12XX系列的性能:
最大跟踪速率达187500min- 1分辨率10/12/14/16位可调;可输出绝对位置和速度;对于故障检测阀值可通过编程设置;内置可编程正弦波振荡器;增量式编码器输出采用A-quad-B格式, 并提供方向输出, 减小软件运算量;12位二 进制并行输出、 总线输出、 A/B/Z编码输出、 10至16位串行SPI输出;AU680X系列的性能:
最大跟踪速率:240,000min- 1 最大角加速度:1,000,000rad/s2自带激励放大电路(部分应用也可增加激励放大电路) ;内部集成振荡器(部分应用需要外部振荡器) ;内部自动补偿激励信号相位偏移;2位二进制并行输出、 总线输出、 A/B/Z编码输出、 串行SPI输出。采样电路:采样电路包括控制器的温度采样、冷却的温度采样、电机的温度采样、IG_ON的检测、HVIL的检测等。
驱动板包括高压采样和驱动电路等。
4.高压采样电路
高压采样电路包括多个高压采样电阻和隔离运放,主要是对母线电流电压,三相电流采样。
5.驱动电路
驱动电路:驱动电路是将DSP输出的驱动信号经过隔离芯片将驱动信号带载能力加强,驱动IGBT,并将故障信号送到DSP,隔离方式主要有磁隔离、容隔离和光电隔离。
02.电机控制器的功能
1.扭矩控制功能
MCU根据VCU发送的扭矩请求指令,控制电机输出需求你扭矩。主要是通过PWM,控制IGBT的开关来实现控制。对于扭矩响应必须有一定的性能要求,比如扭矩响应时间小于60ms,扭矩控制精度满足±3%的要求等。
2.转速控制功能
MCU根据VCU发送的转速指令,控制电机控制器的转速。这个功能主要用于定速续航等需要控制车辆速度的功能时使用。
3.旋变零位自学习功能
旋变是旋转变压器的简称,其作用是输出电机转速相关信号给MCU,算法根据该信号做转速、扭矩等的控制。但是通常旋变在安装是与电机的零位有一定的偏差,因此需要计算这个偏移量。
为了减少人为的工序,MCU应该有旋变标定模式,启动后,MCU自行运行一段程序来检测旋变零位。
4.故障监控
MCU涉及到高压控制,故障监控是必须的,而且策略会比较严苛。故障监控包括直流电流和电压监控、电机定转子温度和电机控制器温度监控、IGBT以及传感器故障监控等。当监测到故障发生时,轻则报警,降功率,重则关闭输出。
除了以上之外,还有网络管理、热管理、功能安全等功能需要MCU来实现。
03.电机控制器的发展趋势
首先从电驱总成来看,从之前的MCU、电机、减速器分离式到后面的三合一集成总成(如图1所示),集成化、域控化是依然是当前的趋势。比如现在的多合一控制器,比如比亚迪E3.0平台中的八合一,其就是将原来分开的VCU、电机控制器、BMS、车载充电器集成到一个控制器中,如图3所示。
 图2 三合一电驱总成
图2 三合一电驱总成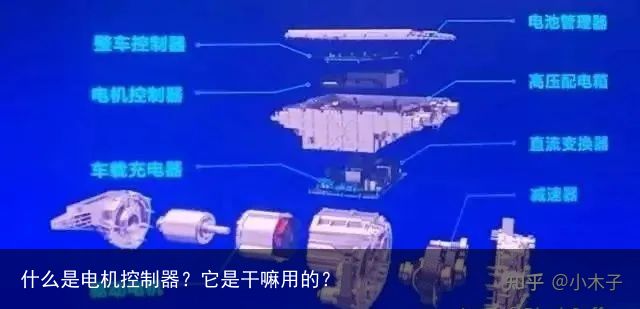 图3 比亚迪E3.0平台的八合一
图3 比亚迪E3.0平台的八合一随着电机控制器的发展,功率密度也随之提升,对功率器件而言,双面水冷技术(DSC)也就应运而生。相比现有IGBT模块, 芯片上层的DCB构成第二条散热通道,用于改善模块的散热效果,如图4所示。
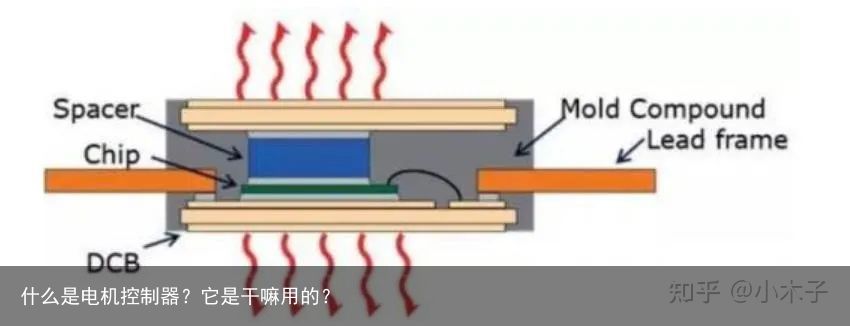 图4 功率器件的双面水冷示意图
图4 功率器件的双面水冷示意图当前国外已有一些使用案例,比如通用第二代Voltec电驱控制器采用的IGBT双面冷却方案 凯迪拉克CT6 PHEV电驱控制器采用的IGBT双面冷却方案 。
丰田THS IV电驱控制器,引入了全新二合一功率卡片式IGBT模块。每个功率卡片包含两个IGBT芯片和两个续流二极管组成的半桥。然后使用多组水冷冷却片来对如上的功率卡片式IGBT进行双面水冷。如图5所示的高压功率模块共包含7个功率卡片式IGBT模组,由8片水冷冷却片对其进行夹紧并双面水冷。整体高压功率模块体积较之前减小了33%。同时电气损失减少了20%。
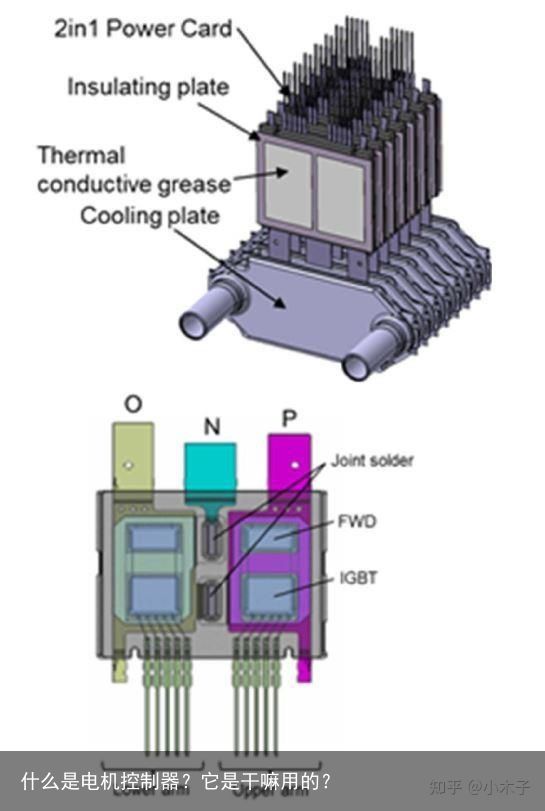 图5 丰田TVS的功率器件双面水冷方案
图5 丰田TVS的功率器件双面水冷方案除此之外,SiC技术也逐渐引入电机控制器中,有关文献表明,基于SiC的永磁同步电机驱动损耗降低50%,效率提高1%左右,在低速情况下,死区效应更小,动态性能更好。另外NEDC效率可以提升3-5%个点。
当前来说,SiC的开关频率一般在20Kz左右,对算法的执行时间优化有一定的要求,另外成本高,目前是IGBT的2~3倍,另外EMC性能差,解决成本较高。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫